1 Sistemas de Ecuaciones Lineales
El objetivo de este capítulo es introducir los conceptos fundamentales para el estudio de sistemas lineales y los métodos para resolverlos.
1.1 Motivación geométrica: rectas en el plano
Gran parte de la teoría del álgebra lineal elemental puede interpretarse como una generalización de las propiedades de la recta.
Recordemos algunas propiedades básicas.
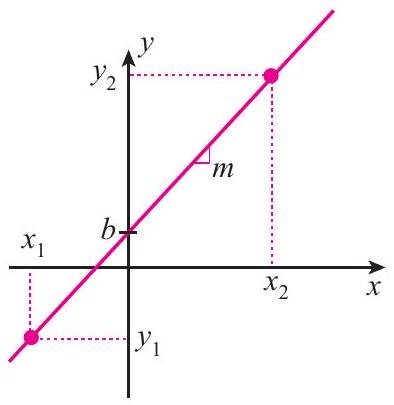
Pendiente de una recta
Si una recta pasa por los puntos \((x_1,y_1)\) y \((x_2,y_2)\), su pendiente es
\[ m=\frac{y_2-y_1}{x_2-x_1}=\frac{\Delta y}{\Delta x}, \quad x_1\neq x_2. \]
Si \(x_2-x_1=0\) y \(y_2\neq y_1\), la recta es vertical y la pendiente es indefinida.
Forma pendiente–intersección
Toda recta no vertical puede escribirse como
\[ y=mx+b, \]
donde
- \(m\) es la pendiente
- \(b\) es la intersección con el eje \(y\).
Propiedades importantes
- Dos rectas son paralelas si tienen la misma pendiente.
- Si una recta se escribe como
\[ ax+by=c, \quad b\neq0, \]
entonces
\[ m=-\frac{a}{b}. \]
- Si \(L_1\) tiene pendiente \(m_1\) y \(L_2\) pendiente \(m_2\), y las rectas son perpendiculares, entonces
\[ m_2=-\frac{1}{m_1}. \]
- Rectas paralelas al eje \(x\) tienen pendiente \(0\).
- Rectas paralelas al eje \(y\) tienen pendiente indefinida.
Estas ideas geométricas permiten interpretar los sistemas de ecuaciones lineales como problemas de intersección de rectas.
1.2 Dos ecuaciones lineales con dos incógnitas
Considérese el sistema
\[ \begin{aligned} a_{11}x+a_{12}y &= b_1 \\ a_{21}x+a_{22}y &= b_2 \end{aligned} \tag{1.1.1} \]
Este sistema suele llamarse sistema \(2\times2\).
Cada ecuación representa una recta en el plano.
Una solución es un par \((x,y)\) que satisface ambas ecuaciones.
1.2.1 Propiedades algebraicas usadas para resolver sistemas
Dos propiedades fundamentales del álgebra permiten manipular ecuaciones:
Propiedad A
Si
\[ a=b \quad \text{y} \quad c=d \]
entonces
\[ a+c=b+d. \]
Esto significa que podemos sumar ecuaciones.
Propiedad B
Si
\[ a=b \]
entonces para cualquier número real \(c\):
\[ ca=cb. \]
Esto permite multiplicar ecuaciones por constantes.
Estas propiedades permiten construir ecuaciones equivalentes que tienen las mismas soluciones.
Ejemplo — Sistema con solución única
Considere
\[ \begin{aligned} 3x-2y &= 4 \\ 5x+2y &= 12 \end{aligned} \tag{1.1.2} \]
Sumando las ecuaciones:
\[ 8x=16 \]
por lo tanto
\[ x=2. \]
Sustituyendo en la segunda ecuación:
\[ 2y=12-5x=12-10=2 \]
por lo que
\[ y=1. \]
La solución es
\[ (2,1). \]
Este sistema tiene una solución única.
Ejemplo — Sistema con infinitas soluciones
Considere
\[ \begin{aligned} x-y &= 7 \\ 2x-2y &= 14 \end{aligned} \tag{1.1.3} \]
Multiplicando la primera ecuación por \(2\):
\[ 2x-2y=14 \]
Se obtiene exactamente la segunda ecuación.
Por lo tanto ambas ecuaciones representan la misma recta.
Despejando:
\[ x-y=7 \]
\[ y=x-7 \]
Entonces cualquier par
\[ (x,x-7) \]
es solución.
Ejemplos de soluciones:
\[ (7,0), (0,-7), (8,1), (1,-6), (3,-4), (-2,-9). \]
Este sistema tiene infinitas soluciones.
Ejemplo — Sistema sin solución
Considere
\[ \begin{aligned} x-y &= 7 \\ 2x-2y &= 13 \end{aligned} \tag{1.1.4} \]
Multiplicando la primera ecuación por \(2\):
\[ 2x-2y=14 \]
lo cual contradice la segunda ecuación.
Por lo tanto el sistema no tiene solución.
Un sistema sin solución se llama sistema inconsistente.
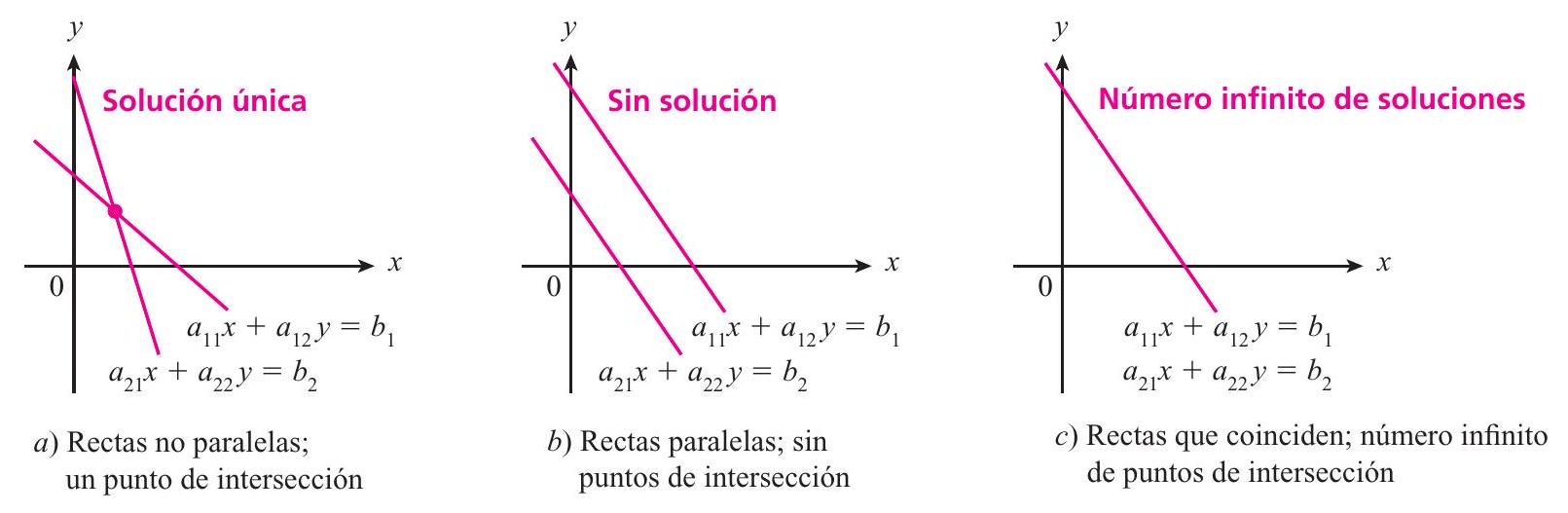
1.2.2 Interpretación geométrica
Cada ecuación representa una recta en el plano.
El sistema busca el punto de intersección de las rectas.
Pueden ocurrir tres situaciones:
Las rectas se intersectan en un punto
→ una soluciónLas rectas coinciden
→ infinitas solucionesLas rectas son paralelas y distintas
→ ninguna solución
1.2.3 Resolución general del sistema \(2\times2\)
Considere nuevamente
\[ \begin{aligned} a_{11}x+a_{12}y &= b_1 \\ a_{21}x+a_{22}y &= b_2 \end{aligned} \]
Multiplicando la primera ecuación por \(a_{22}\) y la segunda por \(a_{12}\):
\[ \begin{aligned} a_{11}a_{22}x+a_{12}a_{22}y &= a_{22}b_1 \\ a_{12}a_{21}x+a_{12}a_{22}y &= a_{12}b_2 \end{aligned} \tag{1.1.5} \]
Restando la segunda ecuación de la primera:
\[ (a_{11}a_{22}-a_{12}a_{21})x = a_{22}b_1-a_{12}b_2 \tag{1.1.6} \]
Si
\[ a_{11}a_{22}-a_{12}a_{21} \neq 0 \]
entonces
\[ x= \frac{a_{22}b_1-a_{12}b_2}{a_{11}a_{22}-a_{12}a_{21}}. \]
Luego se sustituye este valor en el sistema para encontrar \(y\).
Relación con las pendientes
Las pendientes de las rectas son
\[ m_1=-\frac{a_{11}}{a_{12}}, \qquad m_2=-\frac{a_{21}}{a_{22}}. \]
Se puede demostrar que
\[ a_{11}a_{22}-a_{12}a_{21}=0 \]
si y sólo si las rectas son paralelas.
Teorema — Teorema de resumen
Para el sistema
\[ \begin{aligned} a_{11}x+a_{12}y &= b_1 \\ a_{21}x+a_{22}y &= b_2 \end{aligned} \]
ocurre exactamente uno de los siguientes casos:
- Solución única
\[ a_{11}a_{22}-a_{12}a_{21}\neq0 \]
- Sin solución o infinitas soluciones
\[ a_{11}a_{22}-a_{12}a_{21}=0 \]
1.3 \(m\) ecuaciones con \(n\) incógnitas: eliminación de Gauss-Jordan y gaussiana
En esta sección se presenta un método general para encontrar todas las soluciones (si existen) de un sistema de \(m\) ecuaciones lineales con \(n\) incógnitas. Al igual que en el caso \(2\times 2\), un sistema lineal puede:
- no tener solución (inconsistente),
- tener una solución única,
- tener infinitas soluciones.
Para facilitar la generalización se usan variables con subíndices \(x_1,x_2,x_3,\dots\).
1.3.1 Matriz de coeficientes y matriz aumentada
Un sistema puede representarse mediante:
- la matriz de coeficientes \(A\) (de tamaño \(m\times n\)),
- la matriz aumentada \((A \mid b)\), que agrega la columna de términos independientes.
El trabajo se hace con operaciones elementales por renglones, que producen sistemas equivalentes (con el mismo conjunto solución).
Ejemplo: Tres ecuaciones con tres incógnitas (solución única)
Resuelva el sistema
\[ \begin{aligned} 2x_1+4x_2+6x_3 &= 18 \\ 4x_1+5x_2+6x_3 &= 24 \\ 3x_1+x_2-2x_3 &= 4 \end{aligned} \tag{1.2.1} \]
Resumen del procedimiento (idea central):
Se busca simplificar el sistema hasta una forma donde la solución sea evidente. El proceso esencial es:
- Hacer el coeficiente de \(x_1\) igual a \(1\) (dividiendo una ecuación por una constante).
- Usar esa ecuación para eliminar \(x_1\) de las otras ecuaciones.
- Repetir con \(x_2\), y luego con \(x_3\).
- Al final se obtiene un sistema equivalente con la solución explícita.
La solución final es
\[ (x_1,x_2,x_3)=(4,-2,3). \]
Este procedimiento se conoce como eliminación de Gauss–Jordan.
Notación matricial del Ejemplo
La matriz de coeficientes es
\[ A=\begin{pmatrix} 2 & 4 & 6\\ 4 & 5 & 6\\ 3 & 1 & -2 \end{pmatrix} \tag{1.2.7} \]
y la matriz aumentada es
\[ \left(\begin{array}{rrr|r} 2 & 4 & 6 & 18\\ 4 & 5 & 6 & 24\\ 3 & 1 & -2 & 4 \end{array}\right). \tag{1.2.8} \]
1.3.2 Operaciones elementales por renglones
Aplicadas a la matriz aumentada, las operaciones que preservan el conjunto solución son:
- Multiplicar (o dividir) un renglón por un número distinto de cero.
- Sumar a un renglón un múltiplo de otro renglón.
- Intercambiar dos renglones.
Notación estándar
- \(R_i \to cR_i\)
- \(R_j \to R_j + cR_i\)
- \(R_i \leftrightarrows R_j\)
- \(A \to B\) significa que las matrices (y por tanto los sistemas) son equivalentes.
Al aplicar estas operaciones al Ejemplo anterior se llega a
\[\begin{aligned} & \left(\begin{array}{rrr|r}2 & 4 & 6 & 18 \\ 4 & 5 & 6 & 24 \\ 3 & 1 & -2 & 4\end{array}\right) \xrightarrow{\boldsymbol{R}_1 \rightarrow \frac{1}{2} \boldsymbol{R}_1}\left(\begin{array}{rrr|r}1 & 2 & 3 & 9 \\ 4 & 5 & 6 & 24 \\ 3 & 1 & -2 & 4\end{array}\right) \xrightarrow{\substack{\boldsymbol{R}_2 \rightarrow \boldsymbol{R}_2-\mathbf{4} \boldsymbol{R}_1 \\ \boldsymbol{R}_3 \rightarrow \boldsymbol{R}_3-\mathbf{3} \boldsymbol{R}_1}}\left(\begin{array}{rrr|r}1 & 2 & 3 & 9 \\ 0 & -3 & -6 & -12 \\ 0 & -5 & -11 & -23\end{array}\right) \\ & \xrightarrow{\boldsymbol{R}_2 \rightarrow \frac{1}{3} \boldsymbol{R}_2}\left(\begin{array}{rrr|r}1 & 2 & 3 & 9 \\ 0 & 1 & 2 & 4 \\ 0 & 5 & -11 & -23\end{array}\right) \xrightarrow{\substack{\boldsymbol{R}_1 \rightarrow \boldsymbol{R}_1-\mathbf{2} \boldsymbol{R}_2 \\ \boldsymbol{R}_3 \rightarrow \boldsymbol{R}_3+\mathbf{5} \boldsymbol{R}_2}}\left(\begin{array}{rrr|r}1 & 0 & -1 & 1 \\ 0 & 1 & 2 & 4 \\ 0 & 0 & -1 & -3\end{array}\right)\end{aligned}\] \[\xrightarrow{\boldsymbol{R}_3 \rightarrow-\boldsymbol{R}_3}\left(\begin{array}{rrr|r}1 & 0 & -1 & 1 \\ 0 & 1 & 2 & 4 \\ 0 & 0 & 1 & 3\end{array}\right) \xrightarrow{\begin{array}{l}\boldsymbol{R}_1 \rightarrow \boldsymbol{R}_1+\boldsymbol{R}_3 \\ \boldsymbol{R}_2 \rightarrow \boldsymbol{R}_2-\mathbf{2} \boldsymbol{R}_3\end{array}}\left(\begin{array}{rrr|r}1 & 0 & 0 & 4 \\ 0 & 1 & 0 & -2 \\ 0 & 0 & 1 & 3\end{array}\right)\]
de donde se lee inmediatamente la solución \(x_1=4,\;x_2=-2,\;x_3=3\).
Nota: verificarlo con Matrixcalc
Ejemplo: Tres ecuaciones con tres incógnitas (infinitas soluciones)
Resuelva el sistema
\[ \begin{aligned} 2x_1+4x_2+6x_3 &= 18\\ 4x_1+5x_2+6x_3 &= 24\\ 2x_1+7x_2+12x_3 &= 30 \end{aligned} \]
Primero se escribe el sistema como una matriz aumentada: \[ \left(\begin{array}{rrr|r} 2 & 4 & 6 & 18 \\ 4 & 5 & 6 & 24 \\ 2 & 7 & 12 & 30 \end{array}\right) \]
Después se obtiene, sucesivamente, \[ \begin{gathered} \xrightarrow{R_1 \rightarrow \frac{1}{2} R_1}\left(\begin{array}{rrr|r} 1 & 2 & 3 & 9 \\ 4 & 5 & 6 & 24 \\ 2 & 7 & 12 & 30 \end{array}\right) \xrightarrow{\substack{R_2 \rightarrow R_2-4 R_1 \\ R_3 \rightarrow R_3-2 R_1}}\left(\begin{array}{rrr|r} 1 & 2 & 3 & 9 \\ 0 & -3 & -6 & -12 \\ 0 & 3 & 6 & 12 \end{array}\right) \\ \xrightarrow{R_2 \rightarrow \frac{1}{3} R_2}\left(\begin{array}{rrr|r} 1 & 2 & 3 & 9 \\ 0 & 1 & 2 & 4 \\ 0 & 3 & 6 & 12 \end{array}\right) \xrightarrow{\substack{R_1 \rightarrow R_1-2 R_2 \\ R_3 \rightarrow R_3-3 R_2}}\left(\begin{array}{rrr|r} 1 & 0 & -1 & 1 \\ 0 & 1 & 2 & 4 \\ 0 & 0 & 0 & 0 \end{array}\right) \end{gathered} \] Al reducir la matriz aumentada se obtiene un sistema equivalente con una fila de ceros, que corresponde a
\[ \begin{aligned} x_1-x_3 &= 1\\ x_2+2x_3 &= 4 \end{aligned} \]
Como hay tres incógnitas pero sólo dos ecuaciones independientes, hay infinitas soluciones. Tomando \(x_3\) como parámetro:
\[ x_1 = 1+x_3,\qquad x_2 = 4-2x_3. \]
Por tanto, el conjunto solución puede expresarse como
\[ (x_1,x_2,x_3)=\left(1+x_3,\;4-2x_3,\;x_3\right). \]
Ejemplos del texto:
- Si \(x_3=0\): \((1,4,0)\).
- Si \(x_3=10\): \((11,-16,10)\).
Ejemplo Sistema inconsistente (sin solución)
Resuelva el sistema
\[ \begin{aligned} 2x_2+3x_3 &= 4\\ 2x_1-6x_2+7x_3 &= 15\\ x_1-2x_2+5x_3 &= 10 \end{aligned} \tag{1.2.9} \]
Al formar la matriz aumentada y reducir por renglones, aparece una ecuación imposible (contradicción). En forma estándar, la reducción puede llevar a una fila que representa:
\[ 0x_1+0x_2+0x_3 = -1, \]
lo cual es imposible porque \(0\neq -1\). Por tanto, el sistema no tiene solución y es inconsistente.
Definición: Sistemas consistentes e inconsistentes
- Un sistema es inconsistente si no tiene solución.
- Un sistema es consistente si tiene al menos una solución.
1.3.3 Formas escalonadas y pivotes
Definición: Forma escalonada reducida por filas
Una matriz está en forma escalonada reducida por filas si:
- Las filas totalmente cero (si existen) están al final.
- En cada fila no nula, el primer número distinto de cero (de izquierda a derecha) es \(1\).
- En dos filas no nulas consecutivas, el primer \(1\) de la fila inferior está más a la derecha que el de la fila superior.
- En cada columna que contiene un pivote, todos los demás elementos de esa columna son \(0\).
El primer número distinto de cero en una fila se llama pivote de ese renglón.
Ejemplo: Matrices en forma escalonada reducida
Las siguientes matrices están en forma escalonada reducida:
\[ \begin{pmatrix} 1&0&0\\ 0&1&0\\ 0&0&1 \end{pmatrix},\quad \begin{pmatrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&0&1 \end{pmatrix},\quad \begin{pmatrix} 1&0&0&5\\ 0&0&1&2 \end{pmatrix},\quad \begin{pmatrix} 1&0\\ 0&1 \end{pmatrix},\quad \begin{pmatrix} 1&0&2&5\\ 0&1&3&6\\ 0&0&0&0 \end{pmatrix}. \]
Definición: Forma escalonada por filas
Una matriz está en forma escalonada por filas si cumple las condiciones 1), 2) y 3) anteriores (pero no necesariamente la 4).
Ejemplo: Matrices en forma escalonada por filas
\[ \begin{pmatrix} 1&2&3\\ 0&1&5\\ 0&0&1 \end{pmatrix},\quad \begin{pmatrix} 1&-1&6&4\\ 0&1&2&-8\\ 0&0&0&1 \end{pmatrix},\quad \begin{pmatrix} 1&0&2&5\\ 0&0&1&2 \end{pmatrix},\quad \begin{pmatrix} 1&2\\ 0&1 \end{pmatrix},\quad \begin{pmatrix} 1&3&2&5\\ 0&1&3&6\\ 0&0&0&0 \end{pmatrix}. \]
Ejemplo: Eliminación gaussiana y sustitución hacia atrás
Se resuelve el sistema del Ejemplo 1.2.1 del libro reduciendo a forma escalonada por filas. En esta forma se identifica primero \(x_3\), luego se despeja \(x_2\) y después \(x_1\) usando sustitución hacia atrás. A partir de la cuarta matriz equivalente se sigue resolviendo:
\[\xrightarrow{\boldsymbol{R}_3 \rightarrow \boldsymbol{R}_3+\mathbf{5} \boldsymbol{R}_2}\left(\begin{array}{rrr|r}1 & 2 & 3 & 9 \\ 0 & 1 & 2 & 4 \\ 0 & 0 & -1 & -3\end{array}\right) \xrightarrow{\boldsymbol{R}_3 \rightarrow-\boldsymbol{R}_3}\left(\begin{array}{lll|l}1 & 2 & 3 & 9 \\ 0 & 1 & 2 & 4 \\ 0 & 0 & 1 & 3\end{array}\right)\]
Se obtiene de nuevo:
\[ (x_1,x_2,x_3)=(4,-2,3). \]
Este método se llama eliminación gaussiana.
1.3.4 Sistema general \(m\times n\)
Un sistema general de \(m\) ecuaciones con \(n\) incógnitas es
\[ \begin{aligned} a_{11}x_1+a_{12}x_2+\cdots+a_{1n}x_n &= b_1\\ a_{21}x_1+a_{22}x_2+\cdots+a_{2n}x_n &= b_2\\ \vdots \qquad\qquad\qquad\qquad\qquad\qquad\qquad & \vdots\\ a_{m1}x_1+a_{m2}x_2+\cdots+a_{mn}x_n &= b_m \end{aligned} \tag{1.2.10} \]
El coeficiente \(a_{ij}\) es el de \(x_j\) en la ecuación \(i\).
Ejemplo: Dos ecuaciones con cuatro incógnitas (infinitas soluciones)
Resuelva
\[ \begin{aligned} x_1+3x_2-5x_3+x_4 &= 4\\ 2x_1+5x_2-2x_3+4x_4 &= 6 \end{aligned} \]
Reduciendo la matriz aumentada se obtiene un sistema equivalente donde \(x_3\) y \(x_4\) son libres, y:
\[ x_2 = 2+8x_3+2x_4,\qquad x_1 = -2-19x_3-7x_4. \]
Por tanto, el conjunto solución es
\[ (x_1,x_2,x_3,x_4)=\left(-2-19x_3-7x_4,\;2+8x_3+2x_4,\;x_3,\;x_4\right). \]
Ejemplo del texto: si \(x_3=1\) y \(x_4=2\), se obtiene \((-35,14,1,2)\).
1.4 Sistemas homogéneos de ecuaciones
En esta sección se estudian los sistemas homogéneos de ecuaciones lineales. Estos sistemas tienen una estructura especial que simplifica el análisis de sus soluciones.
Definición: Sistema homogéneo
Un sistema lineal general de (m) ecuaciones con (n) incógnitas es homogéneo si todos los términos independientes son cero. En caso contrario se denomina no homogéneo.
El sistema homogéneo general se escribe como
\[ \begin{aligned} a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n &= 0 \\ a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n &= 0 \\ \vdots \qquad\qquad\qquad\qquad & \vdots \\ a_{m1}x_1 + a_{m2}x_2 + \cdots + a_{mn}x_n &= 0 \end{aligned} \tag{1.4.1} \]
1.4.1 Propiedades de las soluciones
En los sistemas no homogéneos pueden ocurrir tres situaciones:
- no hay solución,
- hay una solución única,
- hay infinitas soluciones.
En cambio, en los sistemas homogéneos siempre existe al menos una solución:
\[ x_1 = x_2 = \cdots = x_n = 0 \]
Esta solución se llama solución trivial o solución cero.
Por tanto, un sistema homogéneo sólo puede tener dos tipos de soluciones:
- Únicamente la solución trivial
- Infinitas soluciones, incluyendo soluciones distintas de la trivial
Las soluciones distintas de la trivial se llaman soluciones no triviales.
Ejemplo: Sistema homogéneo con solución trivial única
Resuelva el sistema
\[ \begin{aligned} 2x_1 + 4x_2 + 6x_3 &= 0 \\ 4x_1 + 5x_2 + 6x_3 &= 0 \\ 3x_1 + x_2 - 2x_3 &= 0 \end{aligned} \]
Este sistema es la versión homogénea de un sistema que ya resolvimos anteriormente.
Reduciendo por renglones mediante eliminación de Gauss-Jordan:
\[ \begin{aligned} \begin{pmatrix} 1 & 2 & 3 & | & 0\\ 4 & 5 & 6 & | & 0\\ 3 & 1 & -2 & | & 0 \end{pmatrix} &\rightarrow \begin{pmatrix} 1 & 2 & 3 & | & 0\\ 0 & -3 & -6 & | & 0\\ 0 & -5 & -11 & | & 0 \end{pmatrix} \\ &\rightarrow \begin{pmatrix} 1 & 0 & -1 & | & 0\\ 0 & 1 & 2 & | & 0\\ 0 & 0 & 1 & | & 0 \end{pmatrix} \rightarrow \begin{pmatrix} 1 & 0 & 0 & | & 0\\ 0 & 1 & 0 & | & 0\\ 0 & 0 & 1 & | & 0 \end{pmatrix} \end{aligned} \]
De la última matriz se obtiene
\[ x_1 = 0,\qquad x_2 = 0,\qquad x_3 = 0 \]
Por lo tanto,
\[ \boxed{(0,0,0)} \]
es la única solución del sistema.
Ejemplo: Sistema homogéneo con infinitas soluciones
Resuelva el sistema
\[ \begin{aligned} x_1 + 2x_2 - x_3 &= 0 \\ 3x_1 - 3x_2 + 2x_3 &= 0 \\ -x_1 - 11x_2 + 6x_3 &= 0 \end{aligned} \]
Aplicando eliminación de Gauss-Jordan:
\[ \begin{aligned} \begin{pmatrix} 1 & 2 & -1 & | & 0\\ 3 & -3 & 2 & | & 0\\ -1 & -11 & 6 & | & 0 \end{pmatrix} &\rightarrow \begin{pmatrix} 1 & 2 & -1 & | & 0\\ 0 & -9 & 5 & | & 0\\ 0 & -9 & 5 & | & 0 \end{pmatrix} \\ &\rightarrow \begin{pmatrix} 1 & 0 & -\frac{1}{9} & | & 0\\ 0 & 1 & -\frac{5}{9} & | & 0\\ 0 & 0 & 0 & | & 0 \end{pmatrix} \end{aligned} \]
La presencia de un renglón de ceros indica que existen infinitas soluciones.
Tomando (x_3) como parámetro:
\[ x_1 = \frac{1}{9}x_3 \]
\[ x_2 = \frac{5}{9}x_3 \]
Por tanto, todas las soluciones tienen la forma
\[ (x_1,x_2,x_3)= \left( \frac{1}{9}x_3, \frac{5}{9}x_3, x_3 \right) \]
Ejemplos de soluciones:
- si \(x_3=0\) → \((0,0,0)\) (solución trivial)
- si \(x_3=1\) → \(\left(\frac{1}{9},\frac{5}{9},1\right)\)
- si \(x_3=9\pi\) → \((\pi,5\pi,9\pi)\)
Ejemplo: Sistema homogéneo con más incógnitas que ecuaciones
Resuelva el sistema
\[ \begin{aligned} x_1 + x_2 - x_3 &= 0 \\ 4x_1 - 2x_2 + 7x_3 &= 0 \end{aligned} \tag{1.4.2} \]
Reduciendo por renglones:
\[ \begin{aligned} \begin{pmatrix} 1 & 1 & -1 & | & 0\\ 4 & -2 & 7 & | & 0 \end{pmatrix} &\rightarrow \begin{pmatrix} 1 & 1 & -1 & | & 0\\ 0 & -6 & 11 & | & 0 \end{pmatrix} \\ &\rightarrow \begin{pmatrix} 1 & 0 & \frac{5}{6} & | & 0\\ 0 & 1 & -\frac{11}{6} & | & 0 \end{pmatrix} \end{aligned} \]
Como hay tres incógnitas y sólo dos ecuaciones, una variable queda libre.
Tomando \(x_3\) como parámetro:
\[ x_1 = -\frac{5}{6}x_3 \]
\[ x_2 = \frac{11}{6}x_3 \]
Entonces el conjunto solución es
\[ (x_1,x_2,x_3)= \left( -\frac{5}{6}x_3, \frac{11}{6}x_3, x_3 \right) \]
lo que muestra que el sistema tiene infinitas soluciones.
Teorema: Sistemas homogéneos con infinitas soluciones
Para el sistema homogéneo general
\[ a_{11}x_1+\cdots+a_{1n}x_n=0 \]
\[ \vdots \]
\[ a_{m1}x_1+\cdots+a_{mn}x_n=0 \]
se cumple que:
Si el número de incógnitas es mayor que el número de ecuaciones (\(n>m\)), entonces el sistema homogéneo tiene infinitas soluciones.
Esto ocurre porque necesariamente existirán variables libres, lo que produce un conjunto infinito de soluciones.