3 Determinantes
3.1 Definiciones y propiedades básicas
Los determinantes son herramientas fundamentales en Álgebra Lineal que permiten:
- Determinar si una matriz es invertible.
- Resolver sistemas de ecuaciones lineales.
- Interpretar transformaciones lineales (área, volumen).
- Simplificar cálculos en matrices especiales.
Determinante de una matriz \(2 \times 2\)
Sea \[ A=\begin{pmatrix} a_{11} & a_{12}\\ a_{21} & a_{22} \end{pmatrix} \]
Entonces, \[ \det A = a_{11}a_{22} - a_{12}a_{21} \]
También se denota como: \[ |A| = \left|\begin{matrix} a_{11} & a_{12}\\ a_{21} & a_{22} \end{matrix}\right| \]
Recordatorio:
\[ A \text{ es invertible } \iff \det A \neq 0 \]
Determinante de una matriz \(3 \times 3\)
Sea \[ A=\begin{pmatrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23}\\ a_{31} & a_{32} & a_{33} \end{pmatrix} \]
Entonces, \[ \det A = a_{11}\begin{vmatrix} a_{22} & a_{23}\\ a_{32} & a_{33} \end{vmatrix} - a_{12}\begin{vmatrix} a_{21} & a_{23}\\ a_{31} & a_{33} \end{vmatrix} + a_{13}\begin{vmatrix} a_{21} & a_{22}\\ a_{31} & a_{32} \end{vmatrix} \]
Ejemplo
\[ A=\begin{pmatrix} 4 & 7 & -2\\ 3 & -5 & 1\\ -8 & 6 & 9 \end{pmatrix} \]
\[ \begin{aligned} |A| & =\left|\begin{array}{rrr} 4 & 7 & -2 \\ 3 & -5 & 1 \\ -8 & 6 & 9 \end{array}\right|=4\left|\begin{array}{rr} -5 & 1 \\ 6 & 9 \end{array}\right|-7\left|\begin{array}{rr} 3 & 1 \\ -8 & 9 \end{array}\right|+(-2)\left|\begin{array}{rr} 3 & -5 \\ -8 & 6 \end{array}\right| \\ & =4((-5)(9)-(6)(1))-7((3)(9)-(-8)(1))+(-2)((3)(6)-(-8)(-5)) \\ & =4(-51)-7(35)-2(-22) \\ & =-405 \end{aligned} \]
Ejemplo
\[ \begin{vmatrix} 2 & -3 & 5\\ 1 & 0 & 4\\ 3 & -3 & 9 \end{vmatrix} = 0 \]
Conclusión: la matriz no es invertible.
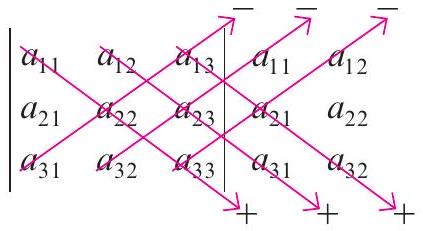
Método alternativo para matrices \(3\times 3\)
\[ \det A = a_{11}a_{22}a_{33} + a_{12}a_{23}a_{31} + a_{13}a_{21}a_{32} - a_{13}a_{22}a_{31} - a_{12}a_{21}a_{33} - a_{11}a_{23}a_{32} \]
Ejemplo
\[ \begin{vmatrix} 3 & 5 & 2\\ 4 & 2 & 3\\ -1 & 2 & 4 \end{vmatrix} = -69 \]
\[ \begin{aligned} |A| & =(3)(2)(4)+(5)(3)(-1)+(2)(4)(2)-(-1)(2)(2)-(2)(3)(3)-(4)(4)(5) \\ & =24-15+16+4-18-80=-69 \end{aligned} \]
Nota: este método no funciona para matrices con dimensiones superiores a 3.
3.1.1 Determinante de orden \(n\)
Menor
El menor \(M_{ij}\) de una matriz \(A\) de tamaño \(n\times n\) se obtiene eliminando la fila \(i\) y columna \(j\) de A.
Ejemplo
Si \[ A=\begin{pmatrix} 2 & -1 & 4\\ 0 & 1 & 5\\ 6 & 3 & -4 \end{pmatrix} \]
\[ M_{13}=\begin{pmatrix}0 & 1\\6 & 3\end{pmatrix}, \quad M_{32}=\begin{pmatrix}2 & 4\\0 & 5\end{pmatrix} \]
Ejemplo
Sea \(A=\left(\begin{array}{rrrr}1 & -3 & 5 & 6 \\ 2 & 4 & 0 & 3 \\ 1 & 5 & 9 & -2 \\ 4 & 0 & 2 & 7\end{array}\right)\). Encuentre \(M_{32}\) y \(M_{24}\).
Al quitar el tercer renglón y la segunda columna de \(A\) se encuentra que \(M_{32}=\left(\begin{array}{lll}1 & 5 & 6 \\ 2 & 0 & 3 \\ 4 & 2 & 7\end{array}\right)\). De igual manera, \(M_{24}=\left(\begin{array}{rrr}1 & -3 & 5 \\ 1 & 5 & 9 \\ 4 & 0 & 2\end{array}\right)\).
Cofactor
Sea \(A\) una matriz de \(n \times n\). El cofactor ij de \(A\), denotado por \(A_{i j}\), está dado por:
\[ A_{ij} = (-1)^{i+j} |M_{ij}| \]
Ejemplo
En el ejemplo anterior se tiene
\[ \begin{aligned} & A_{32}=(-1)^{3+2}\left|M_{32}\right|=-\left|\begin{array}{lll} 1 & 5 & 6 \\ 2 & 0 & 3 \\ 4 & 2 & 7 \end{array}\right|=-8 \\ & A_{24}=(-1)^{2+4}\left|\begin{array}{rrr} 1 & -3 & 5 \\ 1 & 5 & 9 \\ 4 & 0 & 2 \end{array}\right|=-192 \end{aligned} \]
Determinante de orden \(n\)
Se define por expansión por cofactores:
\[ \det A = \sum_{k=1}^{n} a_{1k} A_{1k} \]
Ejemplo (matriz \(4\times4\))
\[ A=\begin{pmatrix} 1 & 3 & 5 & 2\\ 0 & -1 & 3 & 4\\ 2 & 1 & 9 & 6\\ 3 & 2 & 4 & 8 \end{pmatrix} \]
\(\left|\begin{array}{rrrr}1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 2 & 1 & 9 & 6 \\ 3 & 2 & 4 & 8\end{array}\right|=a_{11} A_{11}+a_{12} A_{12}+a_{13} A_{13}+a_{14} A_{14}\)
\[ \begin{aligned} & =1\left|\begin{array}{rrr} -1 & 3 & 4 \\ 1 & 9 & 6 \\ 2 & 4 & 8 \end{array}\right|-3\left|\begin{array}{lll} 0 & 3 & 4 \\ 2 & 9 & 6 \\ 3 & 4 & 8 \end{array}\right|+5\left|\begin{array}{rrr} 0 & -1 & 4 \\ 2 & 1 & 6 \\ 3 & 2 & 8 \end{array}\right|-2\left|\begin{array}{rrr} 0 & -1 & 3 \\ 2 & 1 & 9 \\ 3 & 2 & 4 \end{array}\right| \\ & =1(-92)-3(-70)+5(2)-2(-16)=160 \end{aligned} \]
3.1.2 Matrices triangulares
Definición
- Triangular superior: \(a_{ij}=0\) si \(i>j\)
- Triangular inferior: \(a_{ij}=0\) si \(i<j\)
- Diagonal: \(a_{ij}=0\) si \(i\neq j\)
Ejemplo:
Las matrices \(A=\left(\begin{array}{rrr}2 & 1 & 7 \\ 0 & 2 & -5 \\ 0 & 0 & 1\end{array}\right)\) y \(B=\left(\begin{array}{rrrr}-2 & 3 & 0 & 1 \\ 0 & 0 & 2 & 4 \\ 0 & 0 & 1 & 3 \\ 0 & 0 & 0 & -2\end{array}\right)\) son triangulares superiores; \(C=\left(\begin{array}{rrr}5 & 0 & 0 \\ 2 & 3 & 0 \\ -1 & 2 & 4\end{array}\right)\) y \(D=\left(\begin{array}{ll}0 & 0 \\ 1 & 0\end{array}\right)\) son triangulares inferiores; \(I\) (la matriz identidad) y \(E=\left(\begin{array}{rrr}2 & 0 & 0 \\ 0 & -7 & 0 \\ 0 & 0 & -4\end{array}\right)\) son diagonales. Observe que la matriz \(E\) es también triangular superior y triangular inferior.
Propiedad clave
\[ \det A = a_{11}a_{22}\cdots a_{nn} \]
Ejemplo
Si \[ A=\begin{pmatrix} 2 & 1 & 7\\ 0 & 2 & -5\\ 0 & 0 & 1 \end{pmatrix} \]
\[ \det A = 2\cdot2\cdot1 = 4 \]
3.2 Propiedades de los determinantes
Teorema
\[ \det(AB) = \det(A)\det(B) \]
Nota:
- El lado izquierdo es producto de matrices.
- El lado derecho es producto de escalares.
Ejemplo
Sea \[ A=\begin{pmatrix} 1 & -1 & 2\\ 3 & 1 & 4\\ 0 & -2 & 5 \end{pmatrix}, \quad B=\begin{pmatrix} 1 & -2 & 3\\ 0 & -1 & 4\\ 2 & 0 & -2 \end{pmatrix} \]
Entonces: \[ \det A = 16, \quad \det B = -8 \]
\[ AB=\begin{pmatrix} 5 & -1 & -5\\ 11 & -7 & 5\\ 10 & 2 & -18 \end{pmatrix} \]
\[ \det(AB) = -128 = (16)(-8) \]
Nota:
En general:
\[ \det(A+B) \neq \det(A) + \det(B) \]
Ejemplo
\[ A=\begin{pmatrix}1 & 2\\3 & 4\end{pmatrix}, \quad B=\begin{pmatrix}3 & 0\\-2 & 2\end{pmatrix} \]
\[ \det(A)=-2, \quad \det(B)=6 \]
\[ \det(A+B)=22 \neq 4 \]
3.2.1 Determinante de la transpuesta
Teorema
\[ \det(A^\top) = \det(A) \]
3.2.2 Expansión por cofactores general
Se puede expandir por cualquier fila o columna:
\[ \det A = \sum_{k=1}^n a_{ik}A_{ik} \]
o
\[ \det A = \sum_{k=1}^n a_{kj}A_{kj} \]
Ejemplo
Para \[ A=\begin{pmatrix} 4 & 7 & -2\\ 3 & -5 & 1\\ -8 & 6 & 9 \end{pmatrix} \]
Expandiendo en el segundo renglón se obtiene
\[ \begin{aligned} \operatorname{det} A & =(3) A_{21}+(-5) A_{22}+(1) A_{23} \\ & =(3)(-1)^{2+1}\left|\begin{array}{rr} 7 & -2 \\ 6 & 9 \end{array}\right|+(-5)(-1)^{2+2}\left|\begin{array}{rr} 4 & -2 \\ -8 & 9 \end{array}\right|+(1)(-1)^{2+3}\left|\begin{array}{rr} 4 & 7 \\ -8 & 6 \end{array}\right| \\ & =(3)(-75)+(-5)(20)+(1)(80)=-405 \end{aligned} \]
Expandiendo en la tercera columna se obtiene
\[ \begin{aligned} \operatorname{det} A & =(-2) A_{13}+(1) A_{23}+(9) A_{33} \\ & =(-2)(-1)^{1+3}\left|\begin{array}{rr} 3 & -5 \\ -8 & 6 \end{array}\right|+(1)(-1)^{2+3}\left|\begin{array}{rr} 4 & 7 \\ -8 & 6 \end{array}\right|+(9)(-1)^{3+3}\left|\begin{array}{rr} 4 & 7 \\ 3 & -5 \end{array}\right| \\ & =(-2)(-22)+(1)(-80)+(9)(-41)=-405 \end{aligned} \]
3.2.3 Propiedades fundamentales
Propiedad 1: fila o columna cero
Si una fila o columna es cero: \[ \det A = 0 \]
Ejemplo
\[ \begin{vmatrix} 2 & 3 & 5\\ 0 & 0 & 0\\ 1 & -2 & 4 \end{vmatrix} = 0 \]
Propiedad 2: multiplicación por escalar
Si se multiplica una fila por \(c\):
\[ \det B = c \det A \]
Generalización:
\[ \det(\alpha A) = \alpha^n \det A \]
Propiedad 3: linealidad en una fila/columna
Suponga que \(A, B\) y \(C\) son idénticas excepto por la columna \(j\) y que la columna \(j\) de \(C\) es la suma de las \(j\)-ésimas columnas de \(A\) y \(B\):
\[ \det C = \det A + \det B \]
Nota: lo mismo aplica para filas.
Ejemplo
Sea \(A=\left(\begin{array}{rrr}1 & -1 & 2 \\ 3 & 1 & 4 \\ 0 & -2 & 5\end{array}\right), B=\left(\begin{array}{rrr}1 & -6 & 2 \\ 3 & 2 & 4 \\ 0 & 4 & 5\end{array}\right)\) y \(C=\left(\begin{array}{rrr}1 & -1-6 & 2 \\ 3 & 1+2 & 4 \\ 0 & -2+4 & 5\end{array}\right)=\left(\begin{array}{rrr}1 & -7 & 2 \\ 3 & 3 & 4 \\ 0 & 2 & 5\end{array}\right)\). Entonces \(\operatorname{det} A=16\), \(\operatorname{det} B=108\) y \(\operatorname{det} C=124=\operatorname{det} A+\operatorname{det} B\).
Propiedad 4: intercambio de filas
El intercambio de cualesquiera dos filas (o columnas) distintos de \(A\) tiene el efecto de multiplicar \(\operatorname{det} A\) por -1 .
Ejemplo
Sea \(A=\left(\begin{array}{rrr}1 & -1 & 2 \\ 3 & 1 & 4 \\ 0 & -2 & 5\end{array}\right)\). Al intercambiar los renglones 1 y 3 se obtiene \(B=\left(\begin{array}{rrr}0 & -2 & 5 \\ 3 & 1 & 4 \\ 1 & -1 & 2\end{array}\right)\). Al intercambiar las columnas 1 y 2 de \(A\) se obtiene \(C=\left(\begin{array}{rrr}-1 & 1 & 2 \\ 1 & 3 & 4 \\ -2 & 0 & 5\end{array}\right)\). Por lo que, haciendo los cálculos directos, se encuentra que \(\operatorname{det} A=16\) y \(\operatorname{det} B=\operatorname{det} C=-16\).
Propiedad 5: filas iguales
Si dos filas o columnas son iguales:
\[ \det A = 0 \]
Propiedad 6: filas proporcionales
Si una fila o columna es múltiplo de otra:
\[ \det A = 0 \]
Ejemplo
\[ \begin{vmatrix} 2 & -3 & 5\\ 1 & 7 & 2\\ -4 & 6 & -10 \end{vmatrix} = 0 \]
\(\left|\begin{array}{rrrr}2 & 4 & 1 & 12 \\ -1 & 1 & 0 & 3 \\ 0 & -1 & 9 & -3 \\ 7 & 3 & 6 & 9\end{array}\right|=0\) porque la cuarta columna es igual a tres veces la segunda.
Propiedad 7: operación elemental tipo III
Si se suma un múltiplo escalar de una fila (columna) de \(A\) a otra fila (columna) de \(A\):
\[ \det A \text{ no cambia} \]
Ejemplo
Sea \(A=\left(\begin{array}{rrr}1 & -1 & 2 \\ 3 & 1 & 4 \\ 0 & -2 & 5\end{array}\right)\). Entonces \(\operatorname{det} A=16\). Si se multiplica la tercer fila por 4 y se suma a la segunda fila, se obtiene una nueva matriz \(B\) dada por
\[ B=\left(\begin{array}{ccc} 1 & -1 & 2 \\ 3+4(0) & 1+4(-2) & 4+5(4) \\ 0 & -2 & 5 \end{array}\right)=\left(\begin{array}{rrr} 1 & -1 & 2 \\ 3 & -7 & 24 \\ 0 & -2 & 5 \end{array}\right) \]
\(\mathrm{y} \operatorname{det} B=16=\operatorname{det} A\).
3.2.4 Estrategia práctica
Para calcular determinantes grandes:
- Usar operaciones elementales (Propiedad 7)
- Convertir a matriz triangular
- Aplicar: \[ \det A = \prod a_{ii} \]
Ejemplo (matriz \(4\times4\))
Calcule \(|A|=\left|\begin{array}{rrrr}1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 2 & 1 & 9 & 6 \\ 3 & 2 & 4 & 8\end{array}\right|\)
Ya existe un cero en la primera columna, por lo que lo más sencillo es reducir otros elementos de la primera columna a cero. Se puede continuar la reducción buscando una matriz triangular.
Se multiplica la primera fila por -2 y se suma a la tercera fila; se multiplica la primera fila por -3 y se suma a la cuarta.
\[ |A|=\left|\begin{array}{rrrr} 1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 0 & -5 & -1 & 2 \\ 0 & -7 & -11 & 2 \end{array}\right| \]
Se multiplica la segunda fila por -5 y -7 y se suma la tercera y cuarta filas, respectivamente.
\[ =\left|\begin{array}{rrrr} 1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 0 & 0 & -16 & -18 \\ 0 & 0 & -32 & -26 \end{array}\right| \]
Se factoriza -16 de la tercera fila.
\[ =-16\left|\begin{array}{rrrr} 1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 0 & 0 & 1 & \frac{9}{8} \\ 0 & 0 & -32 & -26 \end{array}\right| \]
Se multiplica la tercera fila por 32 y se suma a la cuarta.
\[ =-16\left|\begin{array}{rrrr} 1 & 3 & 5 & 2 \\ 0 & -1 & 3 & 4 \\ 0 & 0 & 1 & \frac{9}{8} \\ 0 & 0 & 0 & 10 \end{array}\right| \]
Ahora se tiene una matriz triangular superior \(\mathrm{y}|A|=-16(1)(-1)(1)(10)=(-16)(-10)=160\).
3.3 Determinantes e inversas
Teorema 3.3.1
Si \(A\) es invertible, entonces
\[ \det A \neq 0 \]
y además
\[ \det(A^{-1})=\frac{1}{\det A}. \]
Comprobación (uso de propiedades)
Si \(A\) es invertible, entonces
\[ AA^{-1}=I. \]
Tomando determinantes:
\[ \det(AA^{-1})=\det(I)=1. \]
Por la propiedad multiplicativa del determinante,
\[ \det(A)\det(A^{-1})=1, \]
y de ahí se obtiene
\[ \det(A^{-1})=\frac{1}{\det(A)}. \]
Nota:
Este resultado refuerza una idea central del curso:
- si una matriz es invertible, su determinante no puede ser cero;
- y el determinante de la inversa es el recíproco del determinante original.
3.4 Regla de Cramer
La regla de Cramer es un método clásico para resolver sistemas lineales con el mismo número de ecuaciones e incógnitas. Aunque hoy se usa menos en cálculo práctico por la cantidad de operaciones que requiere, sigue siendo importante porque conecta de forma directa:
- sistemas lineales,
- determinantes,
- e inversas de matrices.
Planteamiento general
Considere el sistema de \(n\) ecuaciones lineales con \(n\) incógnitas:
\[ \begin{array}{cccccc} a_{11}x_1 & + & a_{12}x_2 & +\cdots+ & a_{1n}x_n & = b_1 \\ a_{21}x_1 & + & a_{22}x_2 & +\cdots+ & a_{2n}x_n & = b_2 \\ \vdots & & \vdots & & \vdots & \vdots \\ a_{n1}x_1 & + & a_{n2}x_2 & +\cdots+ & a_{nn}x_n & = b_n \end{array} \]
En forma matricial:
\[ A\mathbf{x}=\mathbf{b}. \]
Si
\[ \det A \neq 0, \]
entonces el sistema tiene solución única. La regla de Cramer permite encontrar esa solución sin reducción por renglones y sin calcular explícitamente \(A^{-1}\).
Sea
\[ D=\det A. \]
Para cada \(i=1,2,\dots,n\), se define \(A_i\) como la matriz obtenida al reemplazar la columna \(i\) de \(A\) por el vector \(\mathbf{b}\).
Por ejemplo:
\[ A_1= \begin{pmatrix} b_1 & a_{12} & \cdots & a_{1n}\\ b_2 & a_{22} & \cdots & a_{2n}\\ \vdots & \vdots & & \vdots\\ b_n & a_{n2} & \cdots & a_{nn} \end{pmatrix}, \]
\[ A_2= \begin{pmatrix} a_{11} & b_1 & \cdots & a_{1n}\\ a_{21} & b_2 & \cdots & a_{2n}\\ \vdots & \vdots & & \vdots\\ a_{n1} & b_n & \cdots & a_{nn} \end{pmatrix}, \]
y así sucesivamente hasta \(A_n\).
Luego se define
\[ D_1=\det A_1,\quad D_2=\det A_2,\quad \dots,\quad D_n=\det A_n. \]
Teorema: Regla de Cramer
Si \(A\) es una matriz \(n\times n\) y
\[ \det A \neq 0, \]
entonces la solución única del sistema
\[ A\mathbf{x}=\mathbf{b} \]
está dada por
\[ x_1=\frac{D_1}{D},\quad x_2=\frac{D_2}{D},\quad \dots,\quad x_i=\frac{D_i}{D},\quad \dots,\quad x_n=\frac{D_n}{D}. \]
Ejemplo: sistema \(3\times 3\)
Resolver usando la regla de Cramer:
\[ \begin{aligned} 2x_1+4x_2+6x_3&=18,\\ 4x_1+5x_2+6x_3&=24,\\ 3x_1+x_2-2x_3&=4. \end{aligned} \]
Paso 1: determinante principal
\[ D= \begin{vmatrix} 2 & 4 & 6\\ 4 & 5 & 6\\ 3 & 1 & -2 \end{vmatrix} =6 \neq 0. \]
Por tanto, el sistema tiene solución única.
Paso 2: determinantes auxiliares
\[ D_1= \begin{vmatrix} 18 & 4 & 6\\ 24 & 5 & 6\\ 4 & 1 & -2 \end{vmatrix} =24, \]
\[ D_2= \begin{vmatrix} 2 & 18 & 6\\ 4 & 24 & 6\\ 3 & 4 & -2 \end{vmatrix} =-12, \]
\[ D_3= \begin{vmatrix} 2 & 4 & 18\\ 4 & 5 & 24\\ 3 & 1 & 4 \end{vmatrix} =18. \]
Paso 3: aplicar la regla de Cramer
\[ x_1=\frac{D_1}{D}=\frac{24}{6}=4, \qquad x_2=\frac{D_2}{D}=\frac{-12}{6}=-2, \qquad x_3=\frac{D_3}{D}=\frac{18}{6}=3. \]
Solución:
\[ \boxed{(x_1,x_2,x_3)=(4,-2,3)}. \]
Ejemplo: sistema \(4\times 4\)
Considere el sistema
\[ \begin{aligned} x_1+3x_2+5x_3+2x_4&=2,\\ -x_2+3x_3+4x_4&=0,\\ 2x_1+x_2+9x_3+6x_4&=-3,\\ 3x_1+2x_2+4x_3+8x_4&=-1. \end{aligned} \]
Paso 1: determinante principal
\[ D= \begin{vmatrix} 1 & 3 & 5 & 2\\ 0 & -1 & 3 & 4\\ 2 & 1 & 9 & 6\\ 3 & 2 & 4 & 8 \end{vmatrix} =160 \neq 0. \]
Luego, el sistema tiene solución única.
Paso 2: determinantes auxiliares
El texto da los resultados:
\[ D_1=-464,\qquad D_2=280,\qquad D_3=-56,\qquad D_4=112. \]
Paso 3: aplicar Cramer
\[ x_1=\frac{D_1}{D}=\frac{-464}{160}, \qquad x_2=\frac{D_2}{D}=\frac{280}{160}, \]
\[ x_3=\frac{D_3}{D}=\frac{-56}{160}, \qquad x_4=\frac{D_4}{D}=\frac{112}{160}. \]
Si se simplifican,
\[ x_1=-\frac{29}{10},\qquad x_2=\frac{7}{4},\qquad x_3=-\frac{7}{20},\qquad x_4=\frac{7}{10}. \]
Solución
\[ \boxed{ \left(x_1,x_2,x_3,x_4\right) = \left(-\frac{29}{10},\frac{7}{4},-\frac{7}{20},\frac{7}{10}\right) }. \]