4 Vectores en \(\mathbb R^2\) y \(\mathbb R^3\)
4.1 Vectores en el plano
Motivación
En Álgebra Lineal, el conjunto \(\mathbb{R}^2\) se define como el conjunto de todos los pares ordenados
\[ (x_1,x_2) \]
donde \(x_1\) y \(x_2\) son números reales. Como todo punto del plano puede escribirse como \((x,y)\), es natural identificar el plano con \(\mathbb{R}^2\).
Sin embargo, en muchas aplicaciones de ingeniería y física, como fuerza, velocidad, aceleración o momento, un vector no se interpreta solamente como un punto, sino como un objeto con:
- magnitud o longitud,
- dirección.
Segmentos de recta dirigidos
Dados dos puntos \(P\) y \(Q\) en el plano, el segmento dirigido de \(P\) a \(Q\) se denota por
\[ \overrightarrow{PQ}. \]
El punto \(P\) se llama punto inicial y el punto \(Q\) se llama punto terminal.
Los segmentos
\[ \overrightarrow{PQ} \quad \text{y} \quad \overrightarrow{QP} \]
son diferentes, porque tienen direcciones opuestas.
Dos segmentos dirigidos son equivalentes si tienen la misma magnitud y la misma dirección, aunque estén ubicados en posiciones distintas del plano.
Definición geométrica de vector
Un vector es el conjunto de todos los segmentos de recta dirigidos equivalentes a un segmento dirigido dado.
Cualquier segmento de ese conjunto se llama una representación del vector.
Esto significa que un mismo vector puede dibujarse en distintas partes del plano, siempre que mantenga su longitud y dirección. En particular, cualquier vector puede trasladarse paralelamente para que su punto inicial esté en el origen.
Definición algebraica de vector
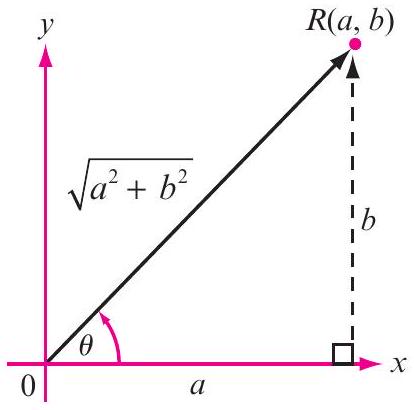
Un vector \(\mathbf{v}\) en el plano \(xy\) es un par ordenado de números reales
\[ \mathbf{v}=(a,b). \]
Los números \(a\) y \(b\) se llaman componentes del vector. El vector cero es
\[ \mathbf{0}=(0,0). \]
Desde esta perspectiva, el vector \((a,b)\) se puede representar como el segmento dirigido que inicia en el origen \((0,0)\) y termina en el punto \((a,b)\).
4.1.1 Magnitud y dirección de un vector
Magnitud o longitud de un vector
Si
\[ \mathbf{v}=(a,b), \]
entonces su magnitud o longitud se define como
\[ |\mathbf{v}|=\sqrt{a^2+b^2}. \]
Esta fórmula se obtiene del teorema de Pitágoras.
La magnitud \(|\mathbf{v}|\) es un escalar. El vector cero tiene magnitud cero y no tiene dirección definida.
Ejemplo: magnitud de seis vectores
Calcule la magnitud de los siguientes vectores.
\[ \mathbf{v}=(2,2) \]
Entonces
\[ |\mathbf{v}|=\sqrt{2^2+2^2}=\sqrt{8}=2\sqrt{2}. \]
\[ \mathbf{v}=(2,2\sqrt{3}) \]
Entonces
\[ |\mathbf{v}|=\sqrt{2^2+(2\sqrt{3})^2} =\sqrt{4+12}=4. \]
\[ \mathbf{v}=(-2\sqrt{3},2) \]
Entonces
\[ |\mathbf{v}|=\sqrt{(-2\sqrt{3})^2+2^2} =\sqrt{12+4}=4. \]
\[ \mathbf{v}=(-3,-3) \]
Entonces
\[ |\mathbf{v}|=\sqrt{(-3)^2+(-3)^2} =\sqrt{18}=3\sqrt{2}. \]
\[ \mathbf{v}=(6,-6) \]
Entonces
\[ |\mathbf{v}|=\sqrt{6^2+(-6)^2} =\sqrt{72}=6\sqrt{2}. \]
\[ \mathbf{v}=(0,3) \]
Entonces
\[ |\mathbf{v}|=\sqrt{0^2+3^2}=3. \]
Dirección de un vector
La dirección de un vector
\[ \mathbf{v}=(a,b) \]
se define como el ángulo \(\theta\), medido en radianes, que forma el vector con el eje \(x\) positivo.
Por convención,
\[ 0\leq \theta < 2\pi. \]
Si \(a\neq 0\), entonces
\[ \tan \theta=\frac{b}{a}. \]
Es importante tener cuidado con el cuadrante, porque la tangente es periódica. Por ejemplo,
\[ \tan\left(\frac{\pi}{4}\right)=\tan\left(\frac{5\pi}{4}\right)=1. \]
Por eso, conocer solamente el valor de la tangente no determina de manera única la dirección del vector.
Ejemplo: direcciones de seis vectores
Se calculan las direcciones de los vectores del ejemplo anterior.
Para
\[ \mathbf{v}=(2,2), \]
el vector está en el primer cuadrante y
\[ \tan\theta=\frac{2}{2}=1. \]
Por tanto,
\[ \theta=\frac{\pi}{4}. \]
Para
\[ \mathbf{v}=(2,2\sqrt{3}), \]
el vector está en el primer cuadrante y
\[ \tan\theta=\frac{2\sqrt{3}}{2}=\sqrt{3}. \]
Por tanto,
\[ \theta=\frac{\pi}{3}. \]
Para
\[ \mathbf{v}=(-2\sqrt{3},2), \]
el vector está en el segundo cuadrante. Como
\[ \tan^{-1}\left(\frac{1}{\sqrt{3}}\right)=\frac{\pi}{6}, \]
la dirección es
\[ \theta=\pi-\frac{\pi}{6}=\frac{5\pi}{6}. \]
Para
\[ \mathbf{v}=(-3,-3), \]
el vector está en el tercer cuadrante y
\[ \tan^{-1}(1)=\frac{\pi}{4}. \]
Por tanto,
\[ \theta=\pi+\frac{\pi}{4}=\frac{5\pi}{4}. \]
Para
\[ \mathbf{v}=(6,-6), \]
el vector está en el cuarto cuadrante y
\[ \tan^{-1}(-1)=-\frac{\pi}{4}. \]
Por tanto,
\[ \theta=2\pi-\frac{\pi}{4}=\frac{7\pi}{4}. \]
Para
\[ \mathbf{v}=(0,3), \]
no se puede usar la fórmula \(\tan\theta=b/a\), porque \(a=0\). Sin embargo, el vector apunta hacia arriba, así que
\[ \theta=\frac{\pi}{2}. \]
En general, si \(b>0\),
\[ \text{dirección de }(0,b)=\frac{\pi}{2}, \]
mientras que
\[ \text{dirección de }(0,-b)=\frac{3\pi}{2}. \]
4.1.2 Propiedades
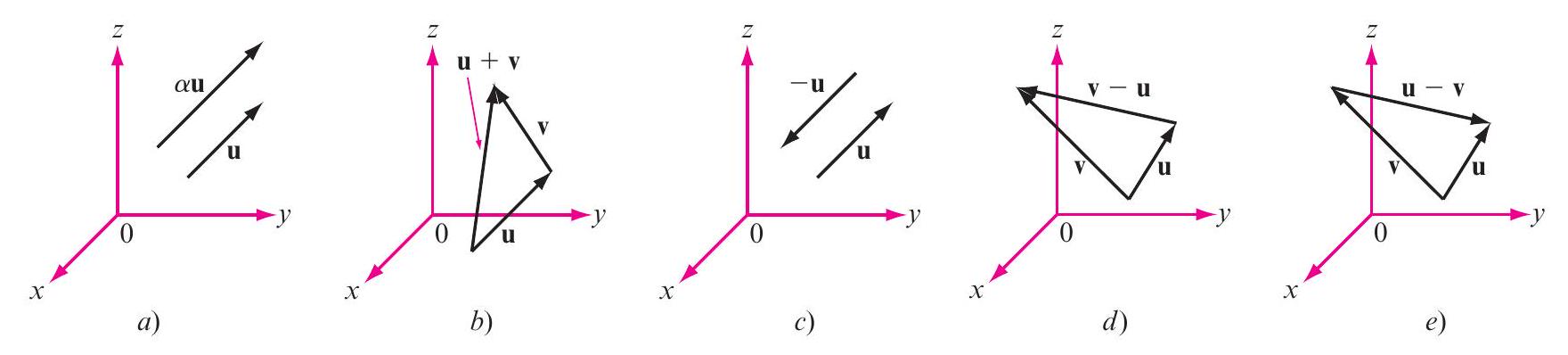
Multiplicación de un vector por un escalar
Si
\[ \mathbf{v}=(a,b), \]
y \(\alpha\) es un escalar, entonces
\[ \alpha\mathbf{v}=(\alpha a,\alpha b). \]
La magnitud de \(\alpha\mathbf{v}\) es
\[ |\alpha\mathbf{v}| = \sqrt{\alpha^2a^2+\alpha^2b^2} = |\alpha|\sqrt{a^2+b^2} = |\alpha|\,|\mathbf{v}|. \tag{4.1.3} \]
Por tanto, multiplicar un vector por un escalar distinto de cero multiplica su longitud por el valor absoluto del escalar.
Dirección de \(\alpha\mathbf{v}\)
Si \(\alpha>0\), entonces \(\alpha\mathbf{v}\) tiene la misma dirección que \(\mathbf{v}\).
Si \(\alpha<0\), entonces \(\alpha\mathbf{v}\) tiene dirección opuesta a la de \(\mathbf{v}\):
\[ \text{dirección de } \alpha\mathbf{v} = \text{dirección de } \mathbf{v}+\pi. \tag{4.1.4} \]
Ejemplo: multiplicación por un escalar
Sea
\[ \mathbf{v}=(1,1). \]
Entonces
\[ |\mathbf{v}|=\sqrt{1^2+1^2}=\sqrt{2}. \]
Además,
\[ 2\mathbf{v}=(2,2), \]
por lo que
\[ |2\mathbf{v}|=\sqrt{2^2+2^2}=\sqrt{8}=2\sqrt{2}=2|\mathbf{v}|. \]
También,
\[ -2\mathbf{v}=(-2,-2), \]
y
\[ |-2\mathbf{v}|=\sqrt{(-2)^2+(-2)^2}=2\sqrt{2}=2|\mathbf{v}|. \]
La dirección de \(2\mathbf{v}\) es
\[ \frac{\pi}{4}, \]
mientras que la dirección de \(-2\mathbf{v}\) es
\[ \frac{5\pi}{4}. \]
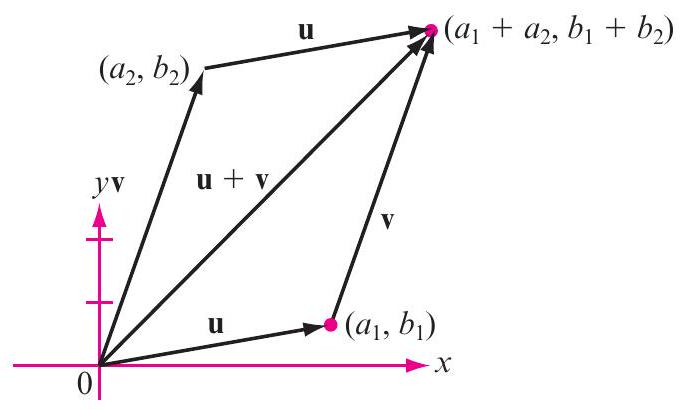
Suma de vectores y regla del paralelogramo
Sean
\[ \mathbf{u}=(a_1,b_1), \qquad \mathbf{v}=(a_2,b_2). \]
Entonces
\[ \mathbf{u}+\mathbf{v}=(a_1+a_2,b_1+b_2). \]
Geométricamente, se puede representar \(\mathbf{u}+\mathbf{v}\) trasladando \(\mathbf{v}\) de modo que su punto inicial coincida con el punto terminal de \(\mathbf{u}\).
También puede construirse mediante la regla del paralelogramo: si \(\mathbf{u}\) y \(\mathbf{v}\) parten del origen, entonces \(\mathbf{u}+\mathbf{v}\) es la diagonal del paralelogramo formado por ambos vectores.
Desigualdad del triángulo
De la interpretación geométrica de la suma se obtiene la desigualdad del triángulo:
\[ |\mathbf{u}+\mathbf{v}|\leq |\mathbf{u}|+|\mathbf{v}|. \tag{4.1.5} \]
Esta desigualdad expresa que la longitud de un lado de un triángulo no puede ser mayor que la suma de las longitudes de los otros dos lados.
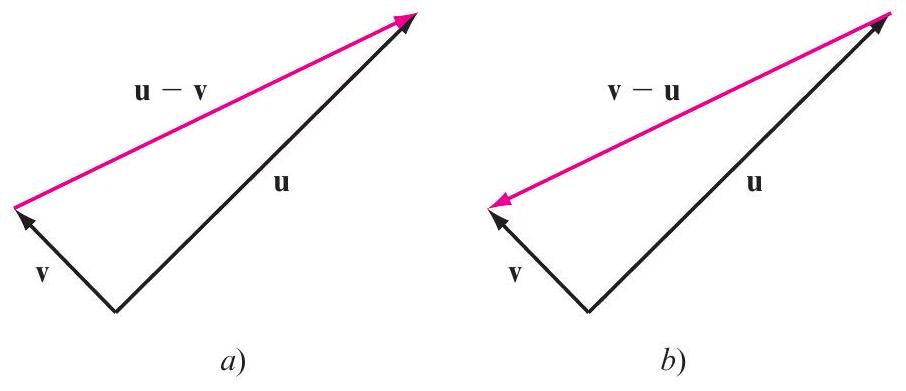
Resta de vectores
El vector
\[ \mathbf{u}-\mathbf{v} \]
es el vector que debe sumarse a \(\mathbf{v}\) para obtener \(\mathbf{u}\):
\[ \mathbf{u}=(\mathbf{u}-\mathbf{v})+\mathbf{v}. \]
Los vectores
\[ \mathbf{u}-\mathbf{v} \quad \text{y} \quad \mathbf{v}-\mathbf{u} \]
tienen la misma magnitud, pero direcciones opuestas.
Vectores básicos \(\mathbf{i}\) y \(\mathbf{j}\)
En \(\mathbb{R}^2\) se definen los vectores
\[ \mathbf{i}=(1,0), \qquad \mathbf{j}=(0,1). \]
Todo vector
\[ \mathbf{v}=(a,b) \]
puede escribirse como
\[ \mathbf{v}=a\mathbf{i}+b\mathbf{j}. \tag{4.1.6} \]
Esta expresión se interpreta como la descomposición del vector en sus componentes horizontal y vertical.
Los vectores \(\mathbf{i}\) y \(\mathbf{j}\) tienen dos propiedades importantes:
- Ninguno es múltiplo del otro.
- Todo vector de \(\mathbb{R}^2\) puede escribirse como combinación de ellos.
Por estas razones, \(\mathbf{i}\) y \(\mathbf{j}\) forman una base de \(\mathbb{R}^2\).
Vectores unitarios
Un vector unitario es un vector de longitud \(1\).
Ejemplo: un vector unitario
Sea
\[ \mathbf{u} = \frac{1}{2}\mathbf{i} + \frac{\sqrt{3}}{2}\mathbf{j}. \]
Entonces
\[ |\mathbf{u}| = \sqrt{\left(\frac12\right)^2+ \left(\frac{\sqrt{3}}{2}\right)^2} = \sqrt{\frac14+\frac34} = 1. \]
Por tanto, \(\mathbf{u}\) es un vector unitario.
Representación de vectores unitarios
Si
\[ \mathbf{u}=a\mathbf{i}+b\mathbf{j} \]
es unitario, entonces
\[ |\mathbf{u}|=\sqrt{a^2+b^2}=1, \]
por lo que
\[ a^2+b^2=1. \]
Esto significa que el punto terminal de \(\mathbf{u}\) está sobre el círculo unitario.
Si \(\theta\) es la dirección de \(\mathbf{u}\), entonces
\[ a=\cos\theta, \qquad b=\operatorname{sen}\theta. \]
Por tanto, cualquier vector unitario se puede escribir como
\[ \mathbf{u}=(\cos\theta)\mathbf{i}+(\operatorname{sen}\theta)\mathbf{j}. \tag{4.1.7} \]
Ejemplo: escribir un vector unitario usando seno y coseno
El vector unitario
\[ \mathbf{u} = \frac{1}{2}\mathbf{i} + \frac{\sqrt{3}}{2}\mathbf{j} \]
puede escribirse como
\[ \mathbf{u} = (\cos\theta)\mathbf{i} + (\operatorname{sen}\theta)\mathbf{j}. \]
Como
\[ \cos\theta=\frac12, \]
y el vector está en el primer cuadrante,
\[ \theta=\frac{\pi}{3}. \]
Vector unitario en la dirección de un vector dado
Si \(\mathbf{v}\) es un vector no nulo, entonces
\[ \mathbf{u}=\frac{\mathbf{v}}{|\mathbf{v}|} \]
es un vector unitario con la misma dirección que \(\mathbf{v}\).
Este proceso se llama normalizar el vector.
Ejemplo: vector unitario en la misma dirección
Encuentre un vector unitario que tenga la misma dirección que
\[ \mathbf{v}=2\mathbf{i}-3\mathbf{j}. \]
Primero calculamos su magnitud:
\[ |\mathbf{v}|=\sqrt{2^2+(-3)^2} = \sqrt{4+9} = \sqrt{13}. \]
Entonces el vector unitario buscado es
\[ \mathbf{u} = \frac{\mathbf{v}}{|\mathbf{v}|} = \frac{2}{\sqrt{13}}\mathbf{i} - \frac{3}{\sqrt{13}}\mathbf{j}. \]
4.2 El producto escalar y las proyecciones en \(\mathbb{R}^2\)
4.2.1 Producto escalar en \(\mathbb{R}^2\)
Si
\[ \mathbf{u}=(a_1,b_1) \]
y
\[ \mathbf{v}=(a_2,b_2), \]
entonces el producto escalar se define como
\[ \mathbf{u}\cdot \mathbf{v}=a_1a_2+b_1b_2. \]
El resultado de un producto escalar es un número real, no un vector.
Ángulo entre dos vectores
Sean \(\mathbf{u}\) y \(\mathbf{v}\) dos vectores diferentes de cero. El ángulo \(\varphi\) entre ellos se define como el ángulo no negativo más pequeño entre sus representaciones con punto inicial en el origen.
Siempre se toma
\[ 0\leq \varphi \leq \pi. \]
Si
\[ \mathbf{u}=\alpha \mathbf{v}, \]
entonces:
- si \(\alpha>0\), los vectores tienen la misma dirección y
\[ \varphi=0; \]
- si \(\alpha<0\), tienen direcciones opuestas y
\[ \varphi=\pi. \]
Magnitud en términos del producto escalar
Para todo vector \(\mathbf{v}\),
\[ |\mathbf{v}|^2=\mathbf{v}\cdot \mathbf{v}. \]
Justificación:
Si
\[ \mathbf{v}=(a,b), \]
entonces
\[ |\mathbf{v}|^2=a^2+b^2. \]
Por otro lado,
\[ \mathbf{v}\cdot \mathbf{v} = (a,b)\cdot(a,b) = a^2+b^2. \]
Por tanto,
\[ |\mathbf{v}|^2=\mathbf{v}\cdot \mathbf{v}. \]
Fórmula del ángulo entre dos vectores
Sean \(\mathbf{u}\) y \(\mathbf{v}\) dos vectores diferentes de cero. Si \(\varphi\) es el ángulo entre ellos, entonces
\[ \cos\varphi= \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{u}|\,|\mathbf{v}|}. \]
Equivalente:
\[ \mathbf{u}\cdot\mathbf{v} = |\mathbf{u}|\,|\mathbf{v}|\cos\varphi. \]
Interpretación
Esta fórmula conecta el producto escalar con la geometría:
- si el ángulo es pequeño, el producto escalar tiende a ser positivo;
- si el ángulo es recto, el producto escalar es cero;
- si el ángulo es obtuso, el producto escalar tiende a ser negativo.
Ejemplo: cálculo del ángulo entre dos vectores
Encuentre el ángulo entre
\[ \mathbf{u}=2\mathbf{i}+3\mathbf{j} \]
y
\[ \mathbf{v}=-7\mathbf{i}+\mathbf{j}. \]
Solución:
Primero calculamos el producto escalar:
\[ \mathbf{u}\cdot\mathbf{v} = 2(-7)+3(1) = -14+3 = -11. \]
También,
\[ |\mathbf{u}| = \sqrt{2^2+3^2} = \sqrt{13}, \]
y
\[ |\mathbf{v}| = \sqrt{(-7)^2+1^2} = \sqrt{50}. \]
Entonces
\[ \cos\varphi = \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{u}|\,|\mathbf{v}|} = \frac{-11}{\sqrt{13}\sqrt{50}} = \frac{-11}{\sqrt{650}}. \]
Aproximadamente,
\[ \cos\varphi\approx -0.431455497. \]
Por lo tanto,
\[ \varphi = \cos^{-1}(-0.431455497) \approx 2.0169. \]
En grados,
\[ \varphi\approx 115.6^\circ. \]
Vectores paralelos
Dos vectores no nulos \(\mathbf{u}\) y \(\mathbf{v}\) son paralelos si el ángulo entre ellos es \(0\) o \(\pi\). Es decir, tienen la misma dirección o direcciones opuestas.
Ejemplo: dos vectores paralelos
Demuestre que
\[ \mathbf{u}=(2,-3) \]
y
\[ \mathbf{v}=(-4,6) \]
son paralelos.
Solución
Calculamos:
\[ \mathbf{u}\cdot\mathbf{v} = 2(-4)+(-3)(6) = -8-18 = -26. \]
Además,
\[ |\mathbf{u}|=\sqrt{2^2+(-3)^2}=\sqrt{13}, \]
y
\[ |\mathbf{v}|=\sqrt{(-4)^2+6^2}=\sqrt{52}=2\sqrt{13}. \]
Entonces
\[ \cos\varphi = \frac{-26}{\sqrt{13}(2\sqrt{13})} = \frac{-26}{26} = -1. \]
Así,
\[ \varphi=\pi. \]
Por lo tanto, los vectores son paralelos y tienen direcciones opuestas.
Caracterización de vectores paralelos
Si
\[ \mathbf{u}\neq \mathbf{0}, \]
entonces
\[ \mathbf{v}=\alpha\mathbf{u} \]
para alguna constante \(\alpha\) si y sólo si \(\mathbf{u}\) y \(\mathbf{v}\) son paralelos.
Interpretación:
Dos vectores son paralelos exactamente cuando uno es múltiplo escalar del otro.
Vectores ortogonales
Dos vectores no nulos \(\mathbf{u}\) y \(\mathbf{v}\) son ortogonales, o perpendiculares, si el ángulo entre ellos es \(\frac{\pi}{2}\).
Ejemplo: dos vectores ortogonales
Demuestre que
\[ \mathbf{u}=3\mathbf{i}+4\mathbf{j} \]
y
\[ \mathbf{v}=-4\mathbf{i}+3\mathbf{j} \]
son ortogonales.
Solución:
Calculamos:
\[ \mathbf{u}\cdot\mathbf{v} = 3(-4)+4(3) = -12+12 = 0. \]
Entonces
\[ \cos\varphi= \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{u}|\,|\mathbf{v}|} = 0. \]
Como
\[ 0\leq \varphi\leq \pi, \]
se concluye que
\[ \varphi=\frac{\pi}{2}. \]
Por tanto, los vectores son ortogonales.
Caracterización de vectores ortogonales
Dos vectores no nulos \(\mathbf{u}\) y \(\mathbf{v}\) son ortogonales si y sólo si
\[ \mathbf{u}\cdot\mathbf{v}=0. \]
Interpretación:
El producto escalar permite verificar perpendicularidad sin dibujar los vectores.
4.2.2 Proyección de un vector
Descomposición de un vector usando una dirección dada
Antes de definir formalmente la proyección, se usa el siguiente resultado:
Sea \(\mathbf{v}\) un vector diferente de cero. Entonces, para cualquier vector \(\mathbf{u}\), el vector
\[ \mathbf{w} = \mathbf{u} - \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v} \]
es ortogonal a \(\mathbf{v}\).
Demostración:
Calculamos el producto escalar de \(\mathbf{w}\) con \(\mathbf{v}\):
\[ \mathbf{w}\cdot\mathbf{v} = \left[ \mathbf{u} - \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v} \right]\cdot \mathbf{v}. \]
Usando propiedades del producto escalar:
\[ \mathbf{w}\cdot\mathbf{v} = \mathbf{u}\cdot\mathbf{v} - \frac{(\mathbf{u}\cdot\mathbf{v})(\mathbf{v}\cdot\mathbf{v})}{|\mathbf{v}|^2}. \]
Como
\[ \mathbf{v}\cdot\mathbf{v}=|\mathbf{v}|^2, \]
entonces
\[ \mathbf{w}\cdot\mathbf{v} = \mathbf{u}\cdot\mathbf{v} - \frac{(\mathbf{u}\cdot\mathbf{v})|\mathbf{v}|^2}{|\mathbf{v}|^2}. \]
Por tanto,
\[ \mathbf{w}\cdot\mathbf{v} = \mathbf{u}\cdot\mathbf{v} - \mathbf{u}\cdot\mathbf{v} = 0. \]
Así, \(\mathbf{w}\) es ortogonal a \(\mathbf{v}\).
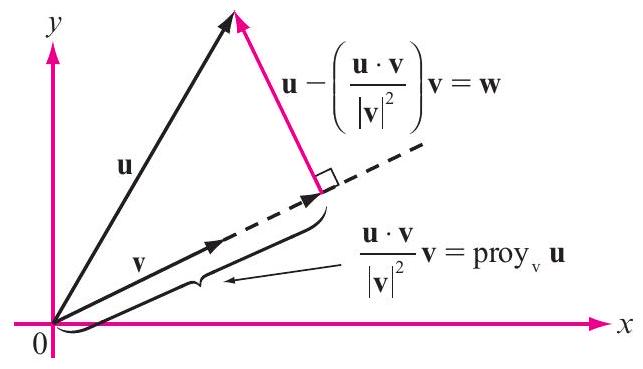
Proyección de un vector sobre otro
Sean \(\mathbf{u}\) y \(\mathbf{v}\) dos vectores no nulos. La proyección de \(\mathbf{u}\) sobre \(\mathbf{v}\) se denota por
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} \]
y se define como
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v}. \]
La componente escalar de \(\mathbf{u}\) en la dirección de \(\mathbf{v}\) es
\[ \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|}. \]
Como
\[ \frac{\mathbf{v}}{|\mathbf{v}|} \]
es un vector unitario en la dirección de \(\mathbf{v}\), la proyección puede interpretarse como la parte de \(\mathbf{u}\) que apunta en la dirección de \(\mathbf{v}\).
Interpretación geométrica de la proyección
La proyección
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} \]
es un vector paralelo a \(\mathbf{v}\).
Además,
\[ \mathbf{u} - \operatorname{proy}_{\mathbf{v}}\mathbf{u} \]
es ortogonal a \(\mathbf{v}\).
De esta manera, el vector \(\mathbf{u}\) puede descomponerse como:
\[ \mathbf{u} = \operatorname{proy}_{\mathbf{v}}\mathbf{u} + \left( \mathbf{u} - \operatorname{proy}_{\mathbf{v}}\mathbf{u} \right), \]
donde una parte es paralela a \(\mathbf{v}\) y la otra es ortogonal a \(\mathbf{v}\).
Signo del producto escalar y dirección de la proyección
Si
\[ \mathbf{u}\cdot\mathbf{v}>0, \]
entonces \(\operatorname{proy}_{\mathbf{v}}\mathbf{u}\) tiene la misma dirección que \(\mathbf{v}\).
Si
\[ \mathbf{u}\cdot\mathbf{v}<0, \]
entonces \(\operatorname{proy}_{\mathbf{v}}\mathbf{u}\) tiene dirección opuesta a \(\mathbf{v}\).
Si
\[ \mathbf{u}\cdot\mathbf{v}=0, \]
entonces los vectores son ortogonales y
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u}=\mathbf{0}. \]
Ejemplo: cálculo de una proyección
Sean
\[ \mathbf{u}=2\mathbf{i}+3\mathbf{j} \]
y
\[ \mathbf{v}=\mathbf{i}+\mathbf{j}. \]
Calcule
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u}. \]
Solución:
Primero,
\[ \mathbf{u}\cdot\mathbf{v} = (2)(1)+(3)(1) = 5. \]
Además,
\[ |\mathbf{v}|^2 = 1^2+1^2 = 2. \]
Por tanto,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v} = \frac{5}{2}(\mathbf{i}+\mathbf{j}). \]
Así,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{5}{2}\mathbf{i} + \frac{5}{2}\mathbf{j}. \]
En forma de par ordenado:
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \left( \frac{5}{2}, \frac{5}{2} \right). \]
Ejemplo: proyección con dirección opuesta
Sean
\[ \mathbf{u}=2\mathbf{i}-3\mathbf{j} \]
y
\[ \mathbf{v}=\mathbf{i}+\mathbf{j}. \]
Calcule
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u}. \]
Solución:
Primero,
\[ \mathbf{u}\cdot\mathbf{v} = (2)(1)+(-3)(1) = -1. \]
Además,
\[ |\mathbf{v}|^2=1^2+1^2=2. \]
Entonces
\[ \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2} = -\frac12. \]
Por tanto,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = -\frac12(\mathbf{i}+\mathbf{j}). \]
Es decir,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = -\frac12\mathbf{i} - \frac12\mathbf{j}. \]
En forma de par ordenado:
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \left( -\frac12, -\frac12 \right). \]
4.3 Vectores en el espacio
Motivación
Así como los puntos del plano se representan mediante pares ordenados, los puntos del espacio se representan mediante ternas ordenadas
\[ (a,b,c). \]
El conjunto de todas estas ternas reales se llama
\[ \mathbb{R}^3. \]
Sistema de coordenadas en \(\mathbb{R}^3\)
Para representar puntos en el espacio se elige un origen \(O\) y tres ejes mutuamente perpendiculares:
- eje \(x\),
- eje \(y\),
- eje \(z\).
Estos ejes determinan tres planos coordenados:
- plano \(xy\),
- plano \(xz\),
- plano \(yz\).
Un punto \(P\) en el espacio se escribe como
\[ P=(x,y,z). \]
Las coordenadas indican distancias dirigidas respecto a los planos coordenados.
Los tres planos coordenados dividen el espacio en ocho regiones llamadas octantes. El octante donde \(x>0\), \(y>0\) y \(z>0\) se llama primer octante.
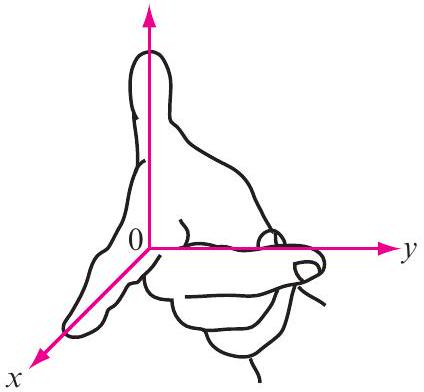
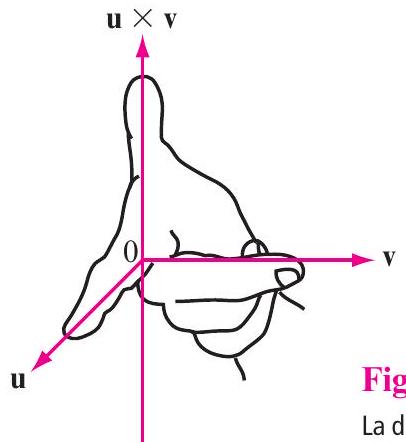
Sistemas derecho e izquierdo
Hay dos formas usuales de orientar los ejes en el espacio:
- sistema derecho,
- sistema izquierdo.
En un sistema derecho, si el dedo índice de la mano derecha apunta en la dirección positiva del eje \(x\) y el dedo medio en la dirección positiva del eje \(y\), entonces el pulgar apunta en la dirección positiva del eje \(z\).
En este curso se adopta el sistema derecho, que es el más común en matemáticas, física e ingeniería.
Distancia entre dos puntos en \(\mathbb{R}^3\)
Sean
\[ P=(x_1,y_1,z_1) \]
y
\[ Q=(x_2,y_2,z_2). \]
La distancia entre \(P\) y \(Q\) está dada por
\[ d(P,Q) = \sqrt{ (x_1-x_2)^2+ (y_1-y_2)^2+ (z_1-z_2)^2 }. \]
Esta fórmula es una extensión directa del teorema de Pitágoras al espacio tridimensional.
Ejemplo: distancia entre dos puntos
Calcule la distancia entre
\[ P=(3,-1,6) \]
y
\[ Q=(-2,3,5). \]
Solución
Aplicamos la fórmula:
\[ d(P,Q) = \sqrt{[3-(-2)]^2+(-1-3)^2+(6-5)^2}. \]
Entonces
\[ d(P,Q) = \sqrt{5^2+(-4)^2+1^2} = \sqrt{25+16+1} = \sqrt{42}. \]
Por tanto,
\[ \boxed{d(P,Q)=\sqrt{42}}. \]
Vectores en \(\mathbb{R}^3\)
Un vector en \(\mathbb{R}^3\) puede interpretarse geométricamente como un conjunto de segmentos dirigidos equivalentes, es decir, segmentos con la misma magnitud y dirección.
Si se toma como punto inicial el origen, un vector puede representarse mediante el punto terminal
\[ (x,y,z). \]
Así, escribimos
\[ \mathbf{v}=(x,y,z). \]
La magnitud de este vector es
\[ |\mathbf{v}|=\sqrt{x^2+y^2+z^2}. \]
Ejemplo: magnitud de un vector en \(\mathbb{R}^3\)
Sea
\[ \mathbf{v}=(1,3,-2). \]
Entonces
\[ |\mathbf{v}| = \sqrt{1^2+3^2+(-2)^2} = \sqrt{1+9+4} = \sqrt{14}. \]
Por tanto,
\[ \boxed{|\mathbf{v}|=\sqrt{14}}. \]
Suma de vectores y multiplicación por escalar
Sean
\[ \mathbf{u}=(x_1,y_1,z_1) \]
y
\[ \mathbf{v}=(x_2,y_2,z_2). \]
Entonces
\[ \mathbf{u}+\mathbf{v} = (x_1+x_2,\;y_1+y_2,\;z_1+z_2). \]
Si \(\alpha\) es un escalar real, entonces
\[ \alpha\mathbf{u} = (\alpha x_1,\;\alpha y_1,\;\alpha z_1). \]
Estas operaciones son análogas a las definidas en \(\mathbb{R}^2\).
Vector unitario en \(\mathbb{R}^3\)
Un vector unitario es un vector de magnitud \(1\).
Si
\[ \mathbf{v}\neq \mathbf{0}, \]
entonces
\[ \mathbf{u}=\frac{\mathbf{v}}{|\mathbf{v}|} \]
es un vector unitario con la misma dirección que \(\mathbf{v}\).
Ejemplo: vector unitario en la misma dirección
Encuentre un vector unitario que tenga la misma dirección que
\[ \mathbf{v}=(2,4,-3). \]
Solución:
Primero calculamos la magnitud:
\[ |\mathbf{v}| = \sqrt{2^2+4^2+(-3)^2} = \sqrt{4+16+9} = \sqrt{29}. \]
Por tanto, el vector unitario buscado es
\[ \mathbf{u} = \frac{\mathbf{v}}{|\mathbf{v}|} = \left( \frac{2}{\sqrt{29}}, \frac{4}{\sqrt{29}}, -\frac{3}{\sqrt{29}} \right). \]
Dirección de un vector en \(\mathbb{R}^3\)
En \(\mathbb{R}^2\), la dirección de un vector puede describirse mediante un solo ángulo. En \(\mathbb{R}^3\), esto no es suficiente, porque muchos vectores diferentes pueden formar el mismo ángulo con un eje:
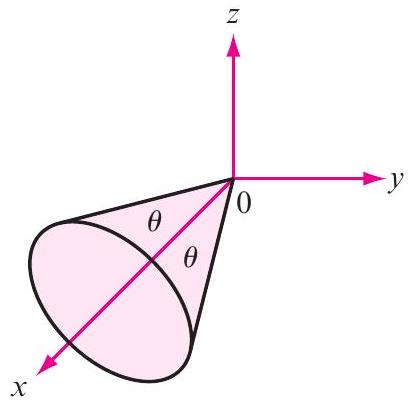
Por eso, la dirección de un vector no nulo \(\mathbf{v}\) se define mediante su vector unitario asociado:
\[ \frac{\mathbf{v}}{|\mathbf{v}|}. \]
Ángulos directores y cosenos directores
Sea
\[ \mathbf{v}=(x_0,y_0,z_0) \]
un vector no nulo.
Se definen:
- \(\alpha\): ángulo entre \(\mathbf{v}\) y el eje \(x\) positivo,
- \(\beta\): ángulo entre \(\mathbf{v}\) y el eje \(y\) positivo,
- \(\gamma\): ángulo entre \(\mathbf{v}\) y el eje \(z\) positivo.
Estos se llaman ángulos directores.
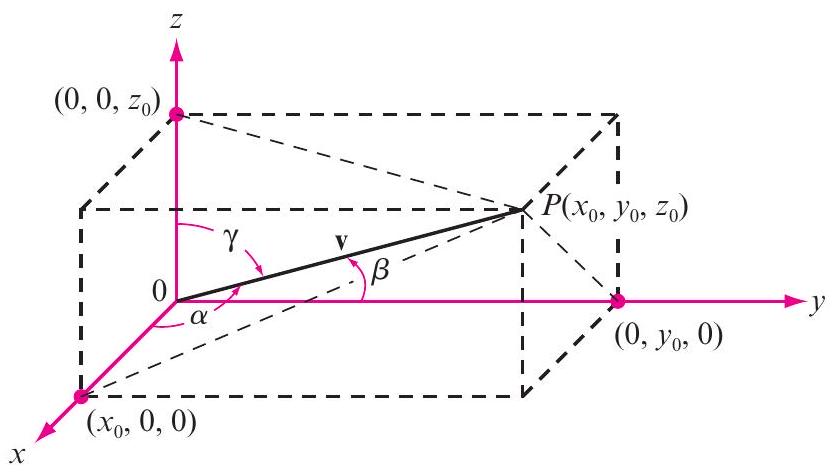
Los cosenos de esos ángulos se llaman cosenos directores y están dados por
\[ \cos\alpha=\frac{x_0}{|\mathbf{v}|}, \qquad \cos\beta=\frac{y_0}{|\mathbf{v}|}, \qquad \cos\gamma=\frac{z_0}{|\mathbf{v}|}. \]
Si \(\mathbf{v}\) es unitario, entonces \(|\mathbf{v}|=1\) y
\[ \cos\alpha=x_0, \qquad \cos\beta=y_0, \qquad \cos\gamma=z_0. \]
Además, siempre se cumple que
\[ \cos^2\alpha+\cos^2\beta+\cos^2\gamma=1. \]
Números directores
Si
\[ \mathbf{v}=(a,b,c) \]
y
\[ |\mathbf{v}|\neq 1, \]
entonces \(a\), \(b\) y \(c\) se llaman números directores del vector.
Ejemplo: cosenos directores
Encuentre los cosenos directores del vector
\[ \mathbf{v}=(4,-1,6). \]
Solución
Primero calculamos su magnitud:
\[ |\mathbf{v}| = \sqrt{4^2+(-1)^2+6^2} = \sqrt{16+1+36} = \sqrt{53}. \]
Entonces la dirección de \(\mathbf{v}\) está dada por
\[ \frac{\mathbf{v}}{|\mathbf{v}|} = \left( \frac{4}{\sqrt{53}}, -\frac{1}{\sqrt{53}}, \frac{6}{\sqrt{53}} \right). \]
Por tanto,
\[ \cos\alpha=\frac{4}{\sqrt{53}}\approx 0.5494, \]
\[ \cos\beta=\frac{-1}{\sqrt{53}}\approx -0.1374, \]
y
\[ \cos\gamma=\frac{6}{\sqrt{53}}\approx 0.8242. \]
De aquí se obtienen aproximadamente los ángulos:
\[ \alpha\approx 56.7^\circ \approx 0.989 \text{ rad}, \]
\[ \beta\approx 97.9^\circ \approx 1.71 \text{ rad}, \]
\[ \gamma\approx 34.5^\circ \approx 0.602 \text{ rad}. \]
Ejemplo: vector dado por magnitud y cosenos directores
Encuentre un vector \(\mathbf{v}\) de magnitud \(7\) cuyos cosenos directores son
\[ \frac{1}{\sqrt{6}}, \qquad \frac{1}{\sqrt{3}}, \qquad \frac{1}{\sqrt{2}}. \]
Solución
Sea
\[ \mathbf{u} = \left( \frac{1}{\sqrt{6}}, \frac{1}{\sqrt{3}}, \frac{1}{\sqrt{2}} \right). \]
Este vector es unitario porque
\[ \left(\frac{1}{\sqrt{6}}\right)^2 + \left(\frac{1}{\sqrt{3}}\right)^2 + \left(\frac{1}{\sqrt{2}}\right)^2 = \frac16+\frac13+\frac12 = 1. \]
Como \(\mathbf{u}\) da la dirección de \(\mathbf{v}\) y \(|\mathbf{v}|=7\), entonces
\[ \mathbf{v}=7\mathbf{u}. \]
Por tanto,
\[ \mathbf{v} = \left( \frac{7}{\sqrt{6}}, \frac{7}{\sqrt{3}}, \frac{7}{\sqrt{2}} \right). \]
Vectores base en \(\mathbb{R}^3\)
En \(\mathbb{R}^3\) se definen los vectores base
\[ \mathbf{i}=(1,0,0), \qquad \mathbf{j}=(0,1,0), \qquad \mathbf{k}=(0,0,1). \tag{4.3.7} \]
Estos son vectores unitarios en las direcciones positivas de los ejes \(x\), \(y\) y \(z\), respectivamente.
Todo vector
\[ \mathbf{v}=(x,y,z) \]
puede escribirse de manera única como
\[ \mathbf{v} = x\mathbf{i}+y\mathbf{j}+z\mathbf{k}. \]
Producto escalar en \(\mathbb{R}^3\)
La definición de producto escalar en \(\mathbb{R}^3\) es
\[ \mathbf{u}\cdot\mathbf{v} = u_1v_1+u_2v_2+u_3v_3, \]
donde
\[ \mathbf{u}=(u_1,u_2,u_3), \qquad \mathbf{v}=(v_1,v_2,v_3). \]
Además, para los vectores base:
\[ \mathbf{i}\cdot\mathbf{i}=1, \qquad \mathbf{j}\cdot\mathbf{j}=1, \qquad \mathbf{k}\cdot\mathbf{k}=1, \]
mientras que
\[ \mathbf{i}\cdot\mathbf{j}=0, \qquad \mathbf{j}\cdot\mathbf{k}=0, \qquad \mathbf{i}\cdot\mathbf{k}=0. \]
Ángulo entre dos vectores en \(\mathbb{R}^3\)
Si \(\varphi\) es el ángulo positivo más pequeño entre dos vectores no nulos \(\mathbf{u}\) y \(\mathbf{v}\), entonces
\[ \cos\varphi = \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{u}|\,|\mathbf{v}|} = \frac{\mathbf{u}}{|\mathbf{u}|}\cdot \frac{\mathbf{v}}{|\mathbf{v}|}. \]
Ejemplo: coseno del ángulo entre dos vectores
Calcule el coseno del ángulo entre
\[ \mathbf{u}=3\mathbf{i}-\mathbf{j}+2\mathbf{k} \]
y
\[ \mathbf{v}=4\mathbf{i}+3\mathbf{j}-\mathbf{k}. \]
Solución
Primero,
\[ \mathbf{u}=(3,-1,2), \qquad \mathbf{v}=(4,3,-1). \]
Calculamos el producto escalar:
\[ \mathbf{u}\cdot\mathbf{v} = 3(4)+(-1)(3)+2(-1) = 12-3-2 = 7. \]
También,
\[ |\mathbf{u}| = \sqrt{3^2+(-1)^2+2^2} = \sqrt{14}, \]
y
\[ |\mathbf{v}| = \sqrt{4^2+3^2+(-1)^2} = \sqrt{26}. \]
Entonces
\[ \cos\varphi = \frac{7}{\sqrt{14}\sqrt{26}} = \frac{7}{\sqrt{364}}. \]
Aproximadamente,
\[ \cos\varphi\approx 0.3669. \]
Por tanto,
\[ \varphi\approx 68.5^\circ \approx 1.2\text{ rad}. \]
Vectores paralelos y ortogonales en \(\mathbb{R}^3\)
Dos vectores no nulos \(\mathbf{u}\) y \(\mathbf{v}\) son:
- Paralelos si el ángulo entre ellos es \(0\) o \(\pi\).
- Ortogonales si el ángulo entre ellos es
\[ \frac{\pi}{2}. \]
Criterios algebraicos
- Si
\[ \mathbf{u}\neq \mathbf{0}, \]
entonces \(\mathbf{u}\) y \(\mathbf{v}\) son paralelos si y sólo si
\[ \mathbf{v}=\alpha\mathbf{u} \]
para algún escalar
\[ \alpha\neq 0. \]
- Si \(\mathbf{u}\) y \(\mathbf{v}\) son diferentes de cero, entonces son ortogonales si y sólo si
\[ \mathbf{u}\cdot\mathbf{v}=0. \]
Proyección de un vector sobre otro en \(\mathbb{R}^3\)
Antes de definir la proyección, se usa el siguiente resultado:
Sea \(\mathbf{v}\) un vector diferente de cero. Para cualquier vector \(\mathbf{u}\),
\[ \mathbf{w} = \mathbf{u} - \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v} \]
es ortogonal a \(\mathbf{v}\).
Definición de proyección
Sean \(\mathbf{u}\) y \(\mathbf{v}\) dos vectores no nulos. La proyección de \(\mathbf{u}\) sobre \(\mathbf{v}\) se define por
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2}\mathbf{v}. \tag{4.3.9} \]
La componente escalar de \(\mathbf{u}\) en la dirección de \(\mathbf{v}\) está dada por
\[ \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|}. \]
Ejemplo: cálculo de una proyección en \(\mathbb{R}^3\)
Sean
\[ \mathbf{u}=2\mathbf{i}+3\mathbf{j}+\mathbf{k} \]
y
\[ \mathbf{v}=\mathbf{i}+2\mathbf{j}-6\mathbf{k}. \]
Encuentre
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u}. \]
Solución
Primero escribimos
\[ \mathbf{u}=(2,3,1), \qquad \mathbf{v}=(1,2,-6). \]
Calculamos el producto escalar:
\[ \mathbf{u}\cdot\mathbf{v} = 2(1)+3(2)+1(-6) = 2+6-6 = 2. \]
Ahora,
\[ |\mathbf{v}|^2 = 1^2+2^2+(-6)^2 = 1+4+36 = 41. \]
Entonces
\[ \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|^2} = \frac{2}{41}. \]
Por tanto,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{2}{41}\mathbf{v} = \frac{2}{41} (\mathbf{i}+2\mathbf{j}-6\mathbf{k}). \]
Así,
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \frac{2}{41}\mathbf{i} + \frac{4}{41}\mathbf{j} - \frac{12}{41}\mathbf{k}. \]
En forma de terna:
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} = \left( \frac{2}{41}, \frac{4}{41}, -\frac{12}{41} \right). \]
La componente escalar de \(\mathbf{u}\) en la dirección de \(\mathbf{v}\) es
\[ \frac{\mathbf{u}\cdot\mathbf{v}}{|\mathbf{v}|} = \frac{2}{\sqrt{41}}. \]
Interpretación geométrica de la proyección
Como en el plano, la proyección
\[ \operatorname{proy}_{\mathbf{v}}\mathbf{u} \]
es un vector paralelo a \(\mathbf{v}\).
Además:
- si
\[ \mathbf{u}\cdot\mathbf{v}>0, \]
entonces la proyección tiene la misma dirección que \(\mathbf{v}\);
- si
\[ \mathbf{u}\cdot\mathbf{v}<0, \]
entonces la proyección tiene dirección opuesta a la de \(\mathbf{v}\);
- si
\[ \mathbf{u}\cdot\mathbf{v}=0, \]
entonces la proyección es el vector cero.
4.4 El producto cruz de dos vectores
Definición de producto cruz
Sean
\[ \mathbf{u}=a_1\mathbf{i}+b_1\mathbf{j}+c_1\mathbf{k} \]
y
\[ \mathbf{v}=a_2\mathbf{i}+b_2\mathbf{j}+c_2\mathbf{k}. \]
El producto cruz de \(\mathbf{u}\) y \(\mathbf{v}\), denotado por
\[ \mathbf{u}\times \mathbf{v}, \]
se define como
\[ \mathbf{u}\times \mathbf{v} = (b_1c_2-c_1b_2)\mathbf{i} + (c_1a_2-a_1c_2)\mathbf{j} + (a_1b_2-b_1a_2)\mathbf{k}. \tag{4.4.1} \]
A diferencia del producto escalar, cuyo resultado es un escalar, el producto cruz da como resultado un vector.
Ejemplo: cálculo directo del producto cruz
Sean
\[ \mathbf{u}=\mathbf{i}-\mathbf{j}+2\mathbf{k} \]
y
\[ \mathbf{v}=2\mathbf{i}+3\mathbf{j}-4\mathbf{k}. \]
Calcule
\[ \mathbf{w}=\mathbf{u}\times\mathbf{v}. \]
Solución
Identificamos las componentes:
\[ \mathbf{u}=(1,-1,2), \qquad \mathbf{v}=(2,3,-4). \]
Usando la fórmula del producto cruz:
\[ \begin{aligned} \mathbf{u}\times\mathbf{v} &= [(-1)(-4)-(2)(3)]\mathbf{i} + [(2)(2)-(1)(-4)]\mathbf{j} + [(1)(3)-(-1)(2)]\mathbf{k}. \end{aligned} \]`
Calculando cada componente:
\[ (-1)(-4)-(2)(3)=4-6=-2, \]
\[ (2)(2)-(1)(-4)=4+4=8, \]
\[ (1)(3)-(-1)(2)=3+2=5. \]
Por tanto,
\[ \mathbf{u}\times\mathbf{v} = -2\mathbf{i}+8\mathbf{j}+5\mathbf{k}. \]
Es decir,
\[ \boxed{\mathbf{u}\times\mathbf{v}=(-2,8,5).} \]
Además, se puede verificar que
\[ \mathbf{u}\cdot(\mathbf{u}\times\mathbf{v})=0 \]
y
\[ \mathbf{v}\cdot(\mathbf{u}\times\mathbf{v})=0. \]
Por tanto, \(\mathbf{u}\times\mathbf{v}\) es ortogonal tanto a \(\mathbf{u}\) como a \(\mathbf{v}\).
Producto cruz usando determinantes
Si
\[ \mathbf{u}=a_1\mathbf{i}+b_1\mathbf{j}+c_1\mathbf{k} \]
y
\[ \mathbf{v}=a_2\mathbf{i}+b_2\mathbf{j}+c_2\mathbf{k}, \]
entonces
\[ \mathbf{u}\times\mathbf{v} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ a_1 & b_1 & c_1\\ a_2 & b_2 & c_2 \end{vmatrix}. \]
Al expandir por la primera fila:
\[ \begin{aligned} \mathbf{u}\times\mathbf{v} &= \mathbf{i} \begin{vmatrix} b_1 & c_1\\ b_2 & c_2 \end{vmatrix} - \mathbf{j} \begin{vmatrix} a_1 & c_1\\ a_2 & c_2 \end{vmatrix} + \mathbf{k} \begin{vmatrix} a_1 & b_1\\ a_2 & b_2 \end{vmatrix}. \end{aligned} \]
De aquí se obtiene nuevamente
\[ \mathbf{u}\times\mathbf{v} = (b_1c_2-c_1b_2)\mathbf{i} + (c_1a_2-a_1c_2)\mathbf{j} + (a_1b_2-b_1a_2)\mathbf{k}. \]
Nota: estrictamente hablando, esto no es un determinante ordinario porque \(\mathbf{i}\), \(\mathbf{j}\) y \(\mathbf{k}\) no son números. Sin embargo, esta notación es una herramienta útil para recordar la fórmula.
Ejemplo: producto cruz usando determinantes
Calcule
\[ \mathbf{u}\times\mathbf{v}, \]
donde
\[ \mathbf{u}=2\mathbf{i}+4\mathbf{j}-5\mathbf{k} \]
y
\[ \mathbf{v}=-3\mathbf{i}-2\mathbf{j}+\mathbf{k}. \]
Solución
Escribimos
\[ \mathbf{u}=(2,4,-5), \qquad \mathbf{v}=(-3,-2,1). \]
Entonces
\[ \mathbf{u}\times\mathbf{v} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ 2 & 4 & -5\\ -3 & -2 & 1 \end{vmatrix}. \]
Expandiendo:
\[ \begin{aligned} \mathbf{u}\times\mathbf{v} &= (4\cdot 1-(-5)(-2))\mathbf{i} - (2\cdot 1-(-5)(-3))\mathbf{j} + (2(-2)-4(-3))\mathbf{k}. \end{aligned} \]
Por tanto,
\[ \mathbf{u}\times\mathbf{v} = (4-10)\mathbf{i} - (2-15)\mathbf{j} + (-4+12)\mathbf{k}. \]
Así,
\[ \mathbf{u}\times\mathbf{v} = -6\mathbf{i}+13\mathbf{j}+8\mathbf{k}. \]
En forma de terna:
\[ \boxed{\mathbf{u}\times\mathbf{v}=(-6,13,8).} \]
4.4.1 Propiedades del producto cruz
Sean \(\mathbf{u}\), \(\mathbf{v}\) y \(\mathbf{w}\) vectores en \(\mathbb{R}^3\), y sea \(\alpha\) un escalar. Entonces:
1. Producto con el vector cero
\[ \mathbf{u}\times\mathbf{0} = \mathbf{0}\times\mathbf{u} = \mathbf{0}. \]
2. Propiedad anticonmutativa
\[ \mathbf{u}\times\mathbf{v} = -(\mathbf{v}\times\mathbf{u}). \]
Esto significa que, en general,
\[ \mathbf{u}\times\mathbf{v} \neq \mathbf{v}\times\mathbf{u}. \]
3. Multiplicación por escalares
\[ (\alpha\mathbf{u})\times\mathbf{v} = \alpha(\mathbf{u}\times\mathbf{v}). \]
4. Propiedad distributiva
\[ \mathbf{u}\times(\mathbf{v}+\mathbf{w}) = (\mathbf{u}\times\mathbf{v})+(\mathbf{u}\times\mathbf{w}). \]
5. Triple producto escalar
\[ (\mathbf{u}\times\mathbf{v})\cdot\mathbf{w} = \mathbf{u}\cdot(\mathbf{v}\times\mathbf{w}). \]
Esta expresión se llama triple producto escalar.
6. Ortogonalidad
\[ \mathbf{u}\cdot(\mathbf{u}\times\mathbf{v})=0, \]
y
\[ \mathbf{v}\cdot(\mathbf{u}\times\mathbf{v})=0. \]
Por tanto,
\[ \mathbf{u}\times\mathbf{v} \]
es ortogonal tanto a \(\mathbf{u}\) como a \(\mathbf{v}\).
7. Paralelismo
Si \(\mathbf{u}\) y \(\mathbf{v}\) no son el vector cero, entonces son paralelos si y sólo si
\[ \mathbf{u}\times\mathbf{v}=\mathbf{0}. \]
Dirección del producto cruz
El vector
\[ \mathbf{u}\times\mathbf{v} \]
es perpendicular a los dos vectores \(\mathbf{u}\) y \(\mathbf{v}\).
Cuando \(\mathbf{u}\) y \(\mathbf{v}\) no son paralelos, existen dos direcciones perpendiculares posibles. La dirección correcta se determina mediante la regla de la mano derecha:
- el dedo índice apunta en la dirección de \(\mathbf{u}\),
- el dedo medio apunta en la dirección de \(\mathbf{v}\),
- el pulgar apunta en la dirección de \(\mathbf{u}\times\mathbf{v}\).
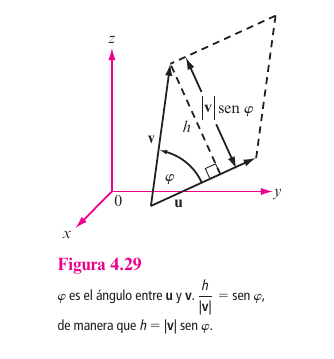
Magnitud del producto cruz
Si \(\varphi\) es el ángulo entre \(\mathbf{u}\) y \(\mathbf{v}\), entonces
\[ |\mathbf{u}\times\mathbf{v}| = |\mathbf{u}|\,|\mathbf{v}|\,\operatorname{sen}\varphi. \tag{4.4.2} \]
Como
\[ 0\leq \varphi\leq \pi, \]
se tiene
\[ \operatorname{sen}\varphi\geq 0. \]
Interpretación geométrica: área de un paralelogramo
Si \(\mathbf{u}\) y \(\mathbf{v}\) son dos lados adyacentes de un paralelogramo, entonces su área es
\[ |\mathbf{u}|\,|\mathbf{v}|\,\operatorname{sen}\varphi. \]
Por el teorema anterior,
\[ \text{Área del paralelogramo} = |\mathbf{u}\times\mathbf{v}|. \tag{4.4.3} \]
Así, el producto cruz permite calcular áreas en el espacio.
Ejemplo: área de un paralelogramo en \(\mathbb{R}^3\)
Encuentre el área del paralelogramo con vértices consecutivos
\[ P=(1,3,-2), \]
\[ Q=(2,1,4), \]
y
\[ R=(-3,1,6). \]
Solución
Tomamos dos lados adyacentes del paralelogramo:
\[ \overrightarrow{PQ}=Q-P. \]
Entonces
\[ \overrightarrow{PQ} = (2-1,\;1-3,\;4-(-2)) = (1,-2,6). \]
También,
\[ \overrightarrow{QR}=R-Q. \]
Así,
\[ \overrightarrow{QR} = (-3-2,\;1-1,\;6-4) = (-5,0,2). \]
El área del paralelogramo es
\[ \text{Área} = |\overrightarrow{PQ}\times\overrightarrow{QR}|. \]
Calculamos:
\[ \overrightarrow{PQ}\times\overrightarrow{QR} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ 1 & -2 & 6\\ -5 & 0 & 2 \end{vmatrix}. \]
Expandiendo,
\[ \overrightarrow{PQ}\times\overrightarrow{QR} = (-4)\mathbf{i} - (32)\mathbf{j} - (10)\mathbf{k}. \]
Es decir,
\[ \overrightarrow{PQ}\times\overrightarrow{QR} = -4\mathbf{i}-32\mathbf{j}-10\mathbf{k}. \]
Entonces
\[ \text{Área} = \sqrt{(-4)^2+(-32)^2+(-10)^2}. \]
Por tanto,
\[ \text{Área} = \sqrt{16+1024+100} = \sqrt{1140}. \]
Así,
\[ \boxed{\text{Área}=\sqrt{1140}\text{ unidades cuadradas}.} \]
Interpretación geométrica del triple producto escalar
Sean \(\mathbf{u}\), \(\mathbf{v}\) y \(\mathbf{w}\) tres vectores que no están en el mismo plano. Estos vectores determinan un paralelepípedo en \(\mathbb{R}^3\).
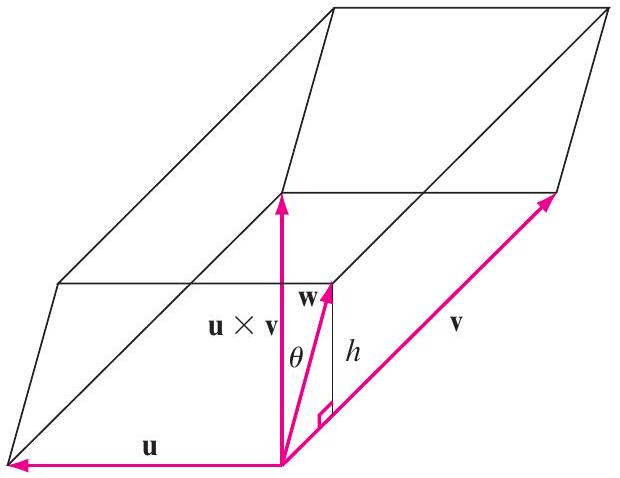
La base del paralelepípedo es el paralelogramo generado por \(\mathbf{u}\) y \(\mathbf{v}\), cuya área es
\[ |\mathbf{u}\times\mathbf{v}|. \]
El vector
\[ \mathbf{u}\times\mathbf{v} \]
es perpendicular a la base. Por tanto, la altura del paralelepípedo se obtiene tomando la componente de \(\mathbf{w}\) en la dirección de \(\mathbf{u}\times\mathbf{v}\):
\[ h= \left| \frac{\mathbf{w}\cdot(\mathbf{u}\times\mathbf{v})} {|\mathbf{u}\times\mathbf{v}|} \right|. \]
Entonces el volumen es
\[ \text{Volumen} = \text{área de la base}\times \text{altura}. \]
Sustituyendo:
\[ \text{Volumen} = |\mathbf{u}\times\mathbf{v}| \left[ \frac{ |\mathbf{w}\cdot(\mathbf{u}\times\mathbf{v})| } {|\mathbf{u}\times\mathbf{v}|} \right]. \]
Por tanto,
\[ \text{Volumen} = |\mathbf{w}\cdot(\mathbf{u}\times\mathbf{v})|. \]
Equivalentemente,
\[ \boxed{ \text{Volumen} = |(\mathbf{u}\times\mathbf{v})\cdot\mathbf{w}| }. \]
Este valor absoluto del triple producto escalar da el volumen del paralelepípedo determinado por los tres vectores.
Ejemplo: volumen de un paralelepípedo en \(\mathbb{R}^3\)
Calcule el volumen del paralelepípedo determinado por los vectores:
\[ \mathbf{u}=\mathbf{i}-\mathbf{j}=(1,-1,0),\qquad \mathbf{v}=3\mathbf{i}+2\mathbf{k}=(3,0,2),\qquad \mathbf{w}=-7\mathbf{j}+3\mathbf{k}=(0,-7,3). \]
El volumen del paralelepípedo determinado por \(\mathbf{u},\mathbf{v},\mathbf{w}\) es el valor absoluto del triple producto escalar:
\[ V=\left|\mathbf{u}\cdot(\mathbf{v}\times\mathbf{w})\right|. \]
Primero calculamos \(\mathbf{v}\times\mathbf{w}\):
\[ \mathbf{v}\times\mathbf{w} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ 3 & 0 & 2\\ 0 & -7 & 3 \end{vmatrix}. \]
Desarrollando el determinante,
\[ \mathbf{v}\times\mathbf{w} = \left(0\cdot 3-2(-7)\right)\mathbf{i} - \left(3\cdot 3-2\cdot 0\right)\mathbf{j} + \left(3(-7)-0\cdot 0\right)\mathbf{k}. \]
Entonces,
\[ \mathbf{v}\times\mathbf{w}=14\mathbf{i}-9\mathbf{j}-21\mathbf{k}. \]
Ahora calculamos el producto punto con \(\mathbf{u}=(1,-1,0)\):
\[ \mathbf{u}\cdot(\mathbf{v}\times\mathbf{w}) = (1,-1,0)\cdot(14,-9,-21) = 14+9+0 = 23. \]
Por lo tanto, el volumen es
\[ V=\left|23\right|=23. \]
En consecuencia, el volumen del paralelepípedo es
\[ \boxed{23\text{ unidades cúbicas}.} \]
Nota: Para dos vectores \(\mathbf{u}=(a,b)\) y \(\mathbf{v}=(c,d)\) en \(\mathbb{R}^2\), el valor absoluto del determinante
\[ \begin{vmatrix} a & b \\ c & d \end{vmatrix} \]
es el área del paralelogramo formado a partir de los vectores \(\mathbf{u}\) y \(\mathbf{v}\).
Si esta área es cero y los vectores no son nulos, entonces son paralelos (sus puntos finales son colineales).
Nota: Para tres vectores \(\mathbf{u}=(a,b,c)\), \(\mathbf{v}=(d,e,f)\) y \(\mathbf{w}=(g,h,i)\) en \(\mathbb{R}^3\), el valor absoluto del determinante
\[ \begin{vmatrix} a & b & c \\ d & e & f \\ g & h & i \end{vmatrix} \]
es el volumen del paralelepípedo formado a partir de los vectores \(\mathbf{u}\), \(\mathbf{v}\) y \(\mathbf{w}\).
Si este volumen es cero y los vectores no son nulos, entonces son coplanares.
4.5 Rectas y planos en el espacio
4.5.1 Rectas en el espacio
Sean
\[ P=(x_1,y_1,z_1), \qquad Q=(x_2,y_2,z_2) \]
dos puntos de una recta \(L\). Un vector paralelo a la recta es
\[ \mathbf{v}=\overrightarrow{PQ} = (x_2-x_1)\mathbf{i}+(y_2-y_1)\mathbf{j}+(z_2-z_1)\mathbf{k}. \tag{4.5.1} \]
Si
\[ R=(x,y,z) \]
es otro punto de la recta, entonces \(\overrightarrow{PR}\) es paralelo a \(\mathbf{v}\), por lo que existe un número real \(t\) tal que
\[ \overrightarrow{PR}=t\mathbf{v}. \tag{4.5.2} \]
Además,
\[
\overrightarrow{0R}=\overrightarrow{0P}+\overrightarrow{PR},
\tag{4.5.3}
\] 
y sustituyendo se obtiene
\[ \overrightarrow{0R}=\overrightarrow{0P}+t\mathbf{v}. \tag{4.5.4} \]
Esta es la ecuación vectorial de la recta.
Ecuaciones paramétricas de una recta
Desarrollando la ecuación vectorial por componentes:
\[ x=x_1+t(x_2-x_1), \]
\[ y=y_1+t(y_2-y_1), \]
\[ z=z_1+t(z_2-z_1). \tag{4.5.5} \]
Estas son las ecuaciones paramétricas de la recta.
Ecuaciones simétricas de una recta
Si definimos
\[ a=x_2-x_1, \qquad b=y_2-y_1, \qquad c=z_2-z_1, \]
y si
\[ a\neq 0,\quad b\neq 0,\quad c\neq 0, \]
entonces, al despejar \(t\) en las ecuaciones paramétricas, se obtiene
\[ \frac{x-x_1}{a}=\frac{y-y_1}{b}=\frac{z-z_1}{c}. \tag{4.5.6} \]
Estas son las ecuaciones simétricas de la recta. Los números \(a,b,c\) son números directores del vector director.
Ejemplo: ecuaciones de una recta que pasa por dos puntos
Encuentre las ecuaciones vectorial, paramétricas y simétricas de la recta \(L\) que pasa por los puntos
\[ P=(2,-1,6), \qquad Q=(3,1,-2). \]
Solución
Primero calculamos el vector director:
\[ \mathbf{v}=\overrightarrow{PQ} = (3-2)\mathbf{i}+[1-(-1)]\mathbf{j}+(-2-6)\mathbf{k} = \mathbf{i}+2\mathbf{j}-8\mathbf{k}. \]
La ecuación vectorial es
\[ \overrightarrow{0R}=\overrightarrow{0P}+t\mathbf{v}. \]
Es decir,
\[ x\mathbf{i}+y\mathbf{j}+z\mathbf{k} = 2\mathbf{i}-\mathbf{j}+6\mathbf{k} +t(\mathbf{i}+2\mathbf{j}-8\mathbf{k}). \] o escrito de otra forma:
\[ (x,y,z)=(2,-1,6)+t(1,2,-8). \] Por componentes, las ecuaciones paramétricas son
\[ x=2+t, \qquad y=-1+2t, \qquad z=6-8t. \]
Como
\[ a=1,\qquad b=2,\qquad c=-8, \]
las ecuaciones simétricas son
\[ \frac{x-2}{1}=\frac{y+1}{2}=\frac{z-6}{-8}. \tag{4.5.7} \]
Por ejemplo, si \(t=3\), se obtiene el punto
\[ (5,5,-18). \]
Ejemplo: ecuaciones simétricas usando un punto y un vector director
Encuentre las ecuaciones simétricas de la recta que pasa por el punto
\[ (1,-2,4) \]
y es paralela al vector
\[ \mathbf{v}=\mathbf{i}+\mathbf{j}-\mathbf{k}. \]
Solución
Usamos la fórmula de ecuaciones simétricas con
\[ P=(1,-2,4), \qquad a=1,\quad b=1,\quad c=-1. \]
Entonces
\[ \frac{x-1}{1}=\frac{y+2}{1}=\frac{z-4}{-1}. \]
Caso especial: cuando un número director es cero
Si uno o más números directores son cero, la forma simétrica debe ajustarse. En estos casos, algunas variables quedan constantes, lo cual indica que la recta está contenida en ciertos planos coordenados o es paralela a uno de los ejes.
Ejemplo: un número director igual a cero
Encuentre las ecuaciones simétricas de la recta que contiene los puntos
\[ P=(3,4,-1), \qquad Q=(-2,4,6). \]
Solución
El vector director es
\[ \mathbf{v}=Q-P=(-5,0,7), \]
de modo que
\[ a=-5,\qquad b=0,\qquad c=7. \]
Una forma paramétrica es
\[ x=3-5t, \qquad y=4, \qquad z=-1+7t. \]
Despejando \(t\):
\[ \frac{x-3}{-5}=\frac{z+1}{7}, \qquad y=4. \]
Aquí la ecuación
\[ y=4 \]
describe un plano paralelo al plano \(xz\). La recta está contenida en ese plano.
Ejemplo: dos números directores iguales a cero
Encuentre las ecuaciones simétricas de la recta que pasa por
\[ P=(2,3,-2), \qquad Q=(2,-1,-2). \]
Solución
El vector director es
\[ \mathbf{v}=Q-P=(0,-4,0)=-4\mathbf{j}. \]
Entonces
\[ a=0,\qquad b=-4,\qquad c=0. \]
Una representación paramétrica es
\[ x=2, \qquad y=3-4t, \qquad z=-2. \]
Esto muestra que la recta se describe por
\[ x=2, \qquad z=-2, \]
y la variable \(y\) queda libre. Es una recta paralela al eje \(y\).
No unicidad de las ecuaciones de una recta
Las ecuaciones paramétricas o simétricas de una recta no son únicas. Si se toman otros dos puntos de la misma recta, o un múltiplo escalar del mismo vector director, se obtienen ecuaciones diferentes que representan la misma recta.
Ejemplo: ilustración de la falta de unicidad
En el primer ejemplo, la recta contiene el punto
\[ (5,5,-18). \]
Si ahora se eligen
\[ P=(5,5,-18), \qquad Q=(3,1,-2), \]
entonces
\[ \mathbf{v}=Q-P=(-2,-4,16)=-2(1,2,-8). \]
Una representación paramétrica es
\[ x=5-2t,\qquad y=5-4t,\qquad z=-18+16t. \]
Las ecuaciones simétricas correspondientes son
\[ \frac{x-5}{-2}=\frac{y-5}{-4}=\frac{z+18}{16}. \]
Estas ecuaciones representan la misma recta del primer ejemplo.
Distancia entre un punto y una recta
Sea \(\ell\) la recta que pasa por el punto \(P\) con vector director \(\mathbf{d}\) y sea \(Q\) otro punto. El área del paralelogramo definido entre el segmento \(PQ\) y \(\mathbf{d}\) es:
\[ \text{área}=\| (Q-P)\times \mathbf{d} \|=\|\mathbf{d}\|\,h \]
donde la altura \(h=d(Q,\ell)\). De este modo,
\[ d(Q,\ell)=\frac{\|(Q-P)\times \mathbf{d}\|}{\|\mathbf{d}\|}. \]
Consecuencia: El punto en una recta más cercano a otro punto
Sea \(\ell\) la recta que pasa por el punto \(P\) con vector director \(\vec{d}\) y sea \(Q\) otro punto. Si
\[
R = P + t\mathbf{d} \in \ell
\] es el punto en \(\ell\) más cercano a \(Q\), entonces \[
Q - R \perp R - P,
\] o bien, \[
0 = (Q - R)\cdot(R - P).
\]
Como \[ R = P + t\mathbf{d}, \] se obtiene \[ 0 = (Q - P - t\mathbf{d})\cdot(t\mathbf{d}) = t\left((Q - P)\cdot \mathbf{d} - t\|\mathbf{d}\|^2\right). \]
De donde \[ t = \frac{(Q - P)\cdot \mathbf{d}}{\|\mathbf{d}\|^2}, \] y por tanto \[ R = P + \frac{(Q - P)\cdot \mathbf{d}}{\|\mathbf{d}\|^2}\,\mathbf{d}. \]
Además, la distancia de \(Q\) a la recta \(\ell\) es \[ d(Q,\ell) = \|R - Q\| = \left\|P - Q + \operatorname{proy}_{\mathbf{d}}(Q - P)\right\|. \]
Note que si \(Q \in \ell\), entonces \(R = Q\) y \[ d(Q,\ell)=0. \]
Distancia entre dos rectas paralelas
Si \(\ell_1\) y \(\ell_2\) son rectas paralelas, entonces
\[ d(\ell_1,\ell_2)=d(Q,\ell_2), \]
para cualquier punto \(Q \in \ell_1\).
Distancia entre dos rectas no paralelas
Sean \(\ell_1\) y \(\ell_2\) dos rectas en \(\mathbb{R}^3\) que no son paralelas. Supongamos que:
- \(\ell_1\) tiene vector director \(\mathbf{d}_1\),
- \(\ell_2\) tiene vector director \(\mathbf{d}_2\),
- \(P_1\) es un punto cualquiera sobre \(\ell_1\),
- \(P_2\) es un punto cualquiera sobre \(\ell_2\).
Es decir,
\[ P_1\in \ell_1, \qquad P_2\in \ell_2. \]
Como las rectas no son paralelas, sus vectores directores no son múltiplos entre sí. Por tanto,
\[ \mathbf{d}_1 \times \mathbf{d}_2 \neq \mathbf{0}. \]
El vector
\[ \mathbf{d}_1 \times \mathbf{d}_2 \]
es perpendicular tanto a \(\mathbf{d}_1\) como a \(\mathbf{d}_2\). Por esa razón, este vector da una dirección perpendicular a ambas rectas.
Para medir la distancia entre dos rectas no paralelas en el espacio, buscamos el segmento más corto que una a ambas rectas.
Ese segmento debe ser perpendicular a las dos rectas. Por eso, su dirección debe ser paralela al vector
\[ \mathbf{d}_1 \times \mathbf{d}_2. \]
Si \(R_1\in \ell_1\) y \(R_2\in \ell_2\) son los puntos donde se alcanza la distancia mínima, entonces el vector
\[ R_1-R_2 \]
es perpendicular a ambas rectas, y por tanto es paralelo a
\[ \mathbf{d}_1 \times \mathbf{d}_2. \]
Así,
\[ d(\ell_1,\ell_2)=\|R_1-R_2\|. \] Aunque no sepamos inicialmente cuáles son los puntos \(R_1\) y \(R_2\), sí podemos tomar puntos conocidos cualesquiera:
\[ P_1\in \ell_1, \qquad P_2\in \ell_2. \]
El vector
\[ P_1-P_2 \]
conecta una recta con la otra, pero no necesariamente es perpendicular a ambas.
La distancia entre las rectas corresponde solamente a la componente de \(P_1-P_2\) en la dirección perpendicular común, es decir, en la dirección de
\[ \mathbf{d}_1 \times \mathbf{d}_2. \]
Por tanto,
\[ d(\ell_1,\ell_2) = \left\| \operatorname{proy}_{\mathbf{d}_1\times \mathbf{d}_2}(P_1-P_2) \right\|. \]
Entonces
\[ \operatorname{proy}_{\mathbf{d}_1\times \mathbf{d}_2}(P_1-P_2) = \frac{(P_1-P_2)\cdot(\mathbf{d}_1\times \mathbf{d}_2)} {\|\mathbf{d}_1\times \mathbf{d}_2\|^2} (\mathbf{d}_1\times \mathbf{d}_2). \]
Tomando norma,
\[ d(\ell_1,\ell_2) = \left\| \frac{(P_1-P_2)\cdot(\mathbf{d}_1\times \mathbf{d}_2)} {\|\mathbf{d}_1\times \mathbf{d}_2\|^2} (\mathbf{d}_1\times \mathbf{d}_2) \right\|. \]
\[ d(\ell_1,\ell_2) = \frac{ \left|(P_1-P_2)\cdot(\mathbf{d}_1\times \mathbf{d}_2)\right| } { \|\mathbf{d}_1\times \mathbf{d}_2\|^2 } \|\mathbf{d}_1\times \mathbf{d}_2\|. \]
Simplificando,
\[ d(\ell_1,\ell_2) = \frac{ \left|(P_1-P_2)\cdot(\mathbf{d}_1\times \mathbf{d}_2)\right| } { \|\mathbf{d}_1\times \mathbf{d}_2\| }. \]
4.5.2 Planos en el espacio
Así como una recta puede describirse mediante un punto y un vector director, un plano puede describirse mediante:
- un punto del plano, y
- un vector normal no nulo.
Un vector normal es perpendicular a todos los vectores contenidos en el plano.
Definición de plano
Sea \(P\) un punto del espacio y sea
\[ \mathbf{n}\neq \mathbf{0} \]
un vector dado. Entonces el conjunto de todos los puntos \(Q\) tales que
\[ \overrightarrow{PQ}\cdot \mathbf{n}=0 \]
forma un plano en \(\mathbb{R}^3\).
Usualmente se denota un plano por la letra
\[ \pi. \]
Si
\[ P=(x_0,y_0,z_0) \]
y
\[ \mathbf{n}=a\mathbf{i}+b\mathbf{j}+c\mathbf{k}, \]
entonces, para un punto cualquiera
\[ Q=(x,y,z), \]
se tiene
\[ \overrightarrow{PQ} = (x-x_0)\mathbf{i}+(y-y_0)\mathbf{j}+(z-z_0)\mathbf{k}. \]
Como \(\overrightarrow{PQ}\perp \mathbf{n}\), se obtiene
\[ a(x-x_0)+b(y-y_0)+c(z-z_0)=0. \tag{4.5.8} \]
Esta es la ecuación punto-normal del plano, o ecuación normal del plano.
Ecuación cartesiana de un plano
La ecuación anterior puede reescribirse como
\[ ax+by+cz=d, \tag{4.5.9} \]
donde
\[ d=ax_0+by_0+cz_0. \]
Esta es la ecuación cartesiana de un plano.
Ejemplo: plano que pasa por un punto y tiene vector normal dado
Encuentre un plano \(\pi\) que pasa por el punto
\[ (2,5,1) \]
y que tiene vector normal
\[ \mathbf{n}=\mathbf{i}-2\mathbf{j}+3\mathbf{k}. \]
Solución
Usamos la ecuación punto-normal:
\[ (x-2)-2(y-5)+3(z-1)=0. \]
Desarrollando:
\[ x-2y+3z=-5. \tag{4.5.10} \]
Los planos coordenados
Los tres planos coordenados tienen ecuaciones muy simples:
Plano \(xy\)
Su ecuación es
\[ z=0. \tag{4.5.11} \]
Plano \(xz\)
Su ecuación es
\[ y=0. \tag{4.5.12} \]
Plano \(yz\)
Su ecuación es
\[ x=0. \tag{4.5.13} \]
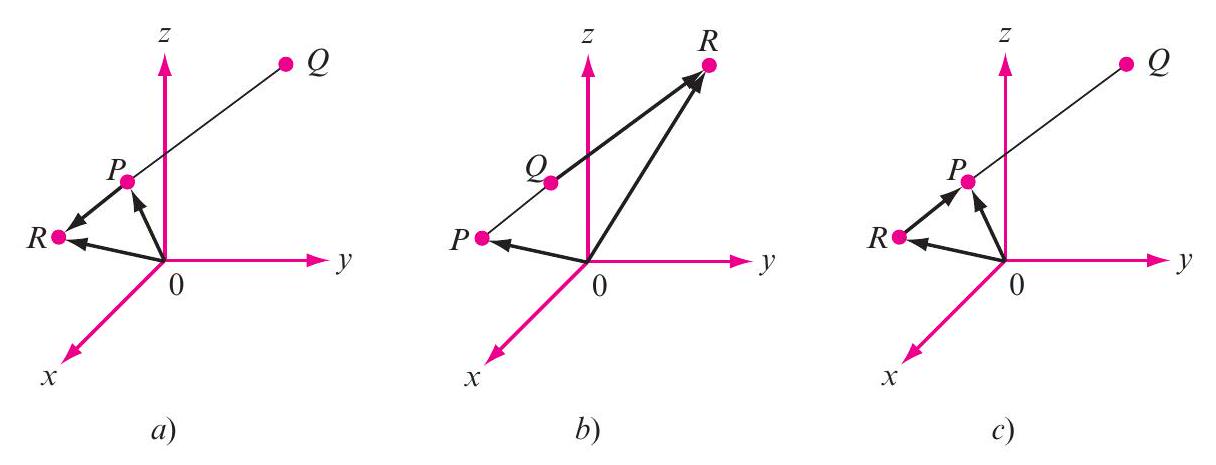
Plano determinado por tres puntos no colineales
Tres puntos no colineales determinan un plano, ya que permiten construir dos vectores no paralelos contenidos en él. El producto cruz de esos vectores proporciona un vector normal al plano.
Ejemplo: plano que pasa por tres puntos
Encuentre la ecuación del plano que pasa por los puntos
\[ P=(1,2,1),\qquad Q=(-2,3,-1),\qquad R=(1,0,4). \]
Solución
Primero construimos dos vectores del plano:
\[ \overrightarrow{PQ}=Q-P=(-3,1,-2), \]
\[ \overrightarrow{QR}=R-Q=(3,-3,5). \]
Un vector normal es
\[ \mathbf{n}=\overrightarrow{PQ}\times\overrightarrow{QR}. \]
Entonces
\[ \mathbf{n} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ -3 & 1 & -2\\ 3 & -3 & 5 \end{vmatrix} = -\mathbf{i}+9\mathbf{j}+6\mathbf{k}. \]
Así,
\[ \mathbf{n}=(-1,9,6). \]
Usando el punto \(P=(1,2,1)\) en la ecuación punto-normal:
\[ -(x-1)+9(y-2)+6(z-1)=0. \]
Desarrollando:
\[ -x+9y+6z=23. \]
Esta es la ecuación del plano.
Planos paralelos
Dos planos son paralelos si sus vectores normales son paralelos, es decir, si el producto cruz de sus normales es cero.
También pueden ser coincidentes, es decir, representar exactamente el mismo plano.
Ejemplo: dos planos paralelos
Considere los planos
\[ \pi_1: 2x+3y-z=3 \]
y
\[ \pi_2: -4x-6y+2z=8. \]
Solución
Los vectores normales son
\[ \mathbf{n}_1=(2,3,-1), \qquad \mathbf{n}_2=(-4,-6,2). \]
Como
\[ \mathbf{n}_2=-2\mathbf{n}_1, \]
los planos son paralelos.
No son coincidentes porque el término independiente no mantiene la misma proporción:
\[ -2(3)=-6\neq 8. \]
Por tanto, son planos paralelos distintos.
Intersección de dos planos
Si dos planos no son paralelos, entonces se intersecan en una recta. Para encontrar esa recta, se resuelve el sistema formado por las ecuaciones de ambos planos.
Ejemplo: recta de intersección de dos planos
Encuentre todos los puntos de intersección de los planos
\[ 2x-y-z=3 \]
y
\[ x+2y+3z=7. \]
Solución
Formamos la matriz aumentada:
\[ \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 2 & -1 & -1 & 3 \end{array} \right). \]
Aplicamos reducción por renglones:
\[ \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 2 & -1 & -1 & 3 \end{array} \right) \xrightarrow{R_2\leftarrow R_2-2R_1} \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 0 & -5 & -7 & -11 \end{array} \right). \]
Luego,
\[ \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 0 & -5 & -7 & -11 \end{array} \right) \xrightarrow{R_2\leftarrow -\frac15R_2} \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 0 & 1 & \frac75 & \frac{11}{5} \end{array} \right). \]
Finalmente,
\[ \left( \begin{array}{ccc|c} 1 & 2 & 3 & 7\\ 0 & 1 & \frac75 & \frac{11}{5} \end{array} \right) \xrightarrow{R_1\leftarrow R_1-2R_2} \left( \begin{array}{ccc|c} 1 & 0 & \frac15 & \frac{13}{5}\\ 0 & 1 & \frac75 & \frac{11}{5} \end{array} \right). \]
Por tanto,
\[ x=\frac{13}{5}-\frac{1}{5}z, \qquad y=\frac{11}{5}-\frac{7}{5}z. \]
Tomando
\[ z=t, \]
se obtiene una representación paramétrica de la recta de intersección:
\[ x=\frac{13}{5}-\frac{1}{5}t, \qquad y=\frac{11}{5}-\frac{7}{5}t, \qquad z=t. \]
Vectores coplanares y triple producto escalar
Tres vectores
\[ \mathbf{u},\mathbf{v},\mathbf{w} \]
son coplanares si y sólo si su triple producto escalar es cero:
\[ (\mathbf{u}\times\mathbf{v})\cdot\mathbf{w}=0. \]
Esta condición es muy útil para determinar si tres vectores están contenidos en un mismo plano.
Ecuación vectorial de un plano
Queremos hallar la ecuación del plano \(\pi\) que pasa por un punto
\[ P=(a_0,b_0,c_0) \]
y posee dos vectores directores
\[ \mathbf{d}_1=(a_1,b_1,c_1), \qquad \mathbf{d}_2=(a_2,b_2,c_2). \]
Si el punto
\[ X=(x,y,z) \]
está en el plano \(\pi\), entonces el vector \(X-P\) está en el plano que pasa por el origen y es paralelo al plano \(\pi\), con vectores directores \(\vec d_1\) y \(\vec d_2\). Por tanto,
\[ X-P=t\mathbf{d}_1+s\mathbf{d}_2, \qquad t,s\in\mathbb{R}. \]
La ecuación
\[ \pi:\; X=P+t\mathbf{d}_1+s\mathbf{d}_2 \]
es la ecuación vectorial del plano \(\pi\) que pasa por el punto \(P\) con vectores directores \(\mathbf{d}_1\) y \(\mathbf{d}_2\).
Al usar coordenadas, se obtiene la ecuación paramétrica (con dos parámetros):
\[ \pi: \begin{cases} x=a_0+t a_1+s a_2,\\ y=b_0+t b_1+s b_2,\\ z=c_0+t c_1+s c_2, \end{cases} \qquad t,s\in\mathbb{R}. \]
Distancia de un punto a un plano
Sea \(\pi\) un plano que pasa por el punto \(P\) y tiene vector normal \(\vec n\), y sea \(Q\) otro punto del espacio.
Si \(R\) es el punto de \(\pi\) más cercano a \(Q\), entonces la distancia del punto \(Q\) al plano \(\pi\) es la longitud del segmento perpendicular entre \(Q\) y el plano, es decir,
\[ d(Q,\pi)=\|Q-R\|. \]
Geométricamente, el vector \(Q-R\) es paralelo al vector normal \(\vec n\), por lo que la distancia corresponde a la magnitud de la proyección de \(Q-P\) sobre \(\vec n\):
\[ d(Q,\pi)=\left\|\operatorname{proy}_{\vec n}(Q-P)\right\|. \]
Tomando norma, se obtiene:
\[ \boxed{ d(Q,\pi)= \frac{|(Q-P)\cdot \vec n|}{\|\vec n\|} } \]
Distancia entre dos planos paralelos
Si \(\pi_1\) y \(\pi_2\) son planos paralelos, entonces \[ d(\pi_1,\pi_2)=d(Q,\pi_2), \] para cualquier punto \(Q \in \pi_1\).
Distancia de una recta paralela a un plano
Si \(\ell\) es una recta paralela a un plano \(\pi\), entonces \[ d(\ell,\pi)=d(Q,\pi), \] para cualquier punto \(Q \in \ell\).